

Жатвенная
часть комбайна предназначена для
скашивания хлебной массы, сбора ее и
подачи в молотилку. В зависимости от
урожайности убираемой культуры комбайн
«Дон-1500» комплектуется жатками с
захватом 5; 6; 7 и 8,6 м. При раздельной
уборке на наклонную камеру навешивают
сменную платформу-подбор-щик (на жатку
захватом 6 м навешивают полотенно-транспор-терный
или грабельный подборщик).
Технические
данные жатвенной части приведены в
таблице 8.1.
- Основные технические данные жатвенной части
- Общее устройство жатвенной части комбайна «Дон-1500»
- Устройство и работа основных рабочих органов и механизмов жатки для уборки зерновых культур комбайна gs12.
- Жатки зерноуборочных комбайнов
- Кормоуборочные комбайны
- Устройство кормоуборочных комбайнов
- Питающие устройства кормоуборочных комбайнов
- Металлоуловители комбайнов
- Измельчающие аппараты кормоуборочных комбайнов
- Характеристики кормоуборочных комбайнов
- Схема общего утройства жатки
- Типы режущих аппаратов и их приводы
- Возвратно-поступательный механизм привода
- Режущий аппарат системы Шуммахера
- Молотило и его устройство
Основные технические данные жатвенной части
Подборщик
(для жатки захватом 6 м)
Общее устройство жатвенной части комбайна «Дон-1500»
Жатвенная
часть состоит из жатки I
(рис.8.2), наклонной камеры, состоящей из
проставки II
с промежуточным битером 10 и
самой
наклонной камеры III
c
наклонным (плавающим) транспортером 5.
Жатка состоит из сварного корпуса 2,
режущего аппарата 16, мотовила 17, шнека
13 с пальчиковым механизмом, уравновешивающего
механизма, опорных башмаков 12, делителя
15 и механизмов привода.
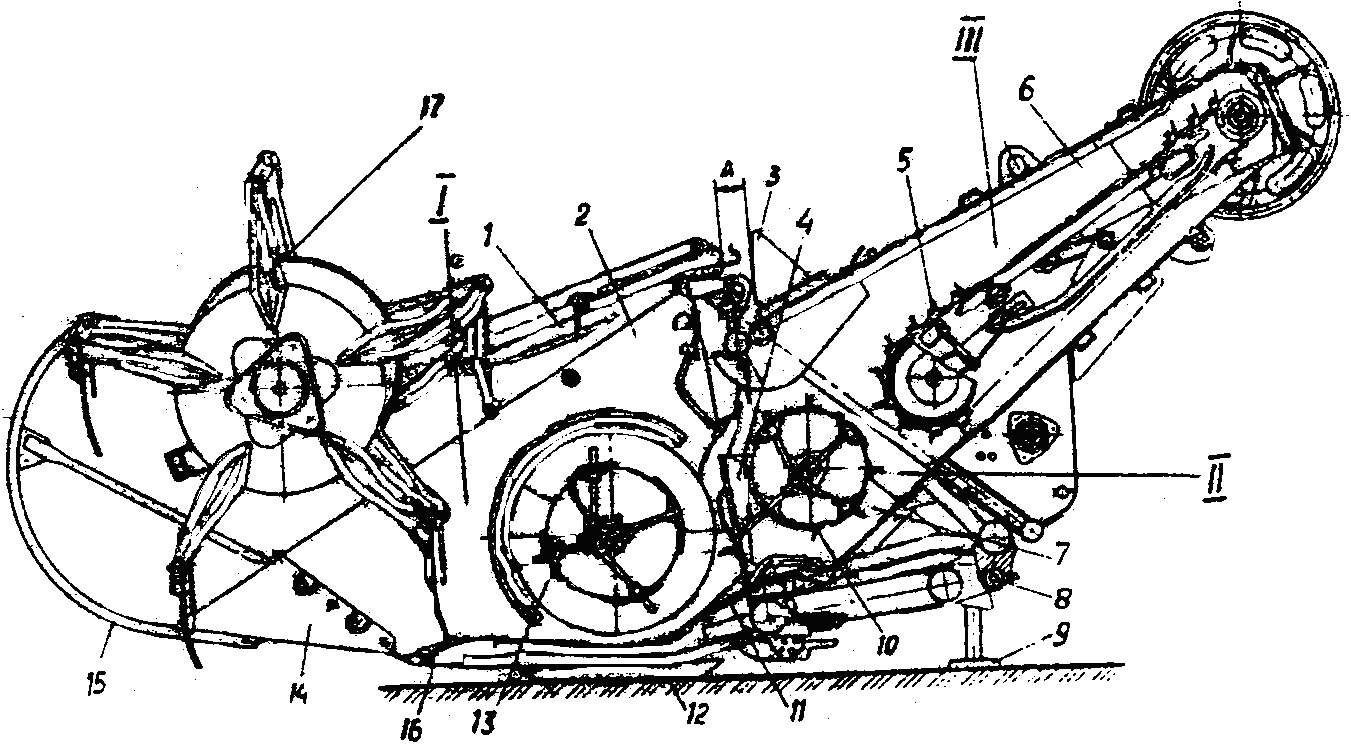
Рис. 8.2. Жатвенная
часть комбайна «Дон-1500»:
1
− упор-предохранитель подъема мотовила;
2 − корпус жатки; 3 − упор наклонной
камеры; 4 − щиток бокового уплотнителя;
5 − наклонный (плавающий) транспортер;
6 − корпус наклонной камеры; 7 – корпус
проставки;
8
− центральный шарнир; 9 − домкрат; 10 −
промежуточный битер; 11 − переходной
щиток; 12 − башмак; 13 − шнек; 14 − съемный
носок; 15 − прутковый делитель; 16 −
режущий аппарат; 17 − мотовило; А − зазор
между брусом корпуса жатки и упором
наклонной камеры; I
− жатка (хедер); II
– проставка; III
– наклонная камера
Проставка
шарнирно соединена с корпусом жатки,
что обеспечивает копирование рельефа
поля последней, а разъемное соединение
с корпусом наклонной камеры облегчает
монтаж и демонтаж при замене жатки на
платформу-подборщик.
Для
перевозки жатки по дорогам предусмотрена
одноосная тележка.
Жатка
включает
корпус 2 (рис. 8.2), режущий аппарат 16,
мотовило 17, шнек 13, уравновешивающий
механизм и механизм привода.
Корпус
является
основой жатки. Он содержит каркас,
образованный трубчатой балкой, передним
брусом и поперечными связями. Каркас
обшит листовой сталью и образует кожух
шнека, ветровой щит и боковины. В центре
ветрового щита выполнено окно, в которое
входит проставка наклонной камеры.
В
центральной части колена трубчатой
балки закреплен кронштейн со сферическим
шарниром для соединения с корпусом
проставки, а с обеих сторон колена –
щеки, контактирующие с роликами,
установленными на корпусе проставки.
Такое соединение корпусов жатки и
наклонной камеры (проставки) позволяет
жатке копировать рельеф поля в поперечном
и продольном направлениях.
К
боковинам корпуса жатки приварены
кронштейны подвески шнека и крепления
гидроцилиндров подъема мотовила. В
правой боковине выполнено окно для
монтажа и демонтажа шнека жатки.
Делитель
хлебной массы.
В зависимости от условий уборки и вида
убираемой культуры на боковинах корпуса
жатки устанавливают носки 2 (рис. 8.3 б),
образующие вместе с боковинами делители
хлебной массы, либо прутковые делители
(рис. 8.3 в).
Рис. 8.3. Делители:
а
− боковина без делителя; б − боковина
жатки с носком; в − прутковый делитель;
1 и 3 − болты;
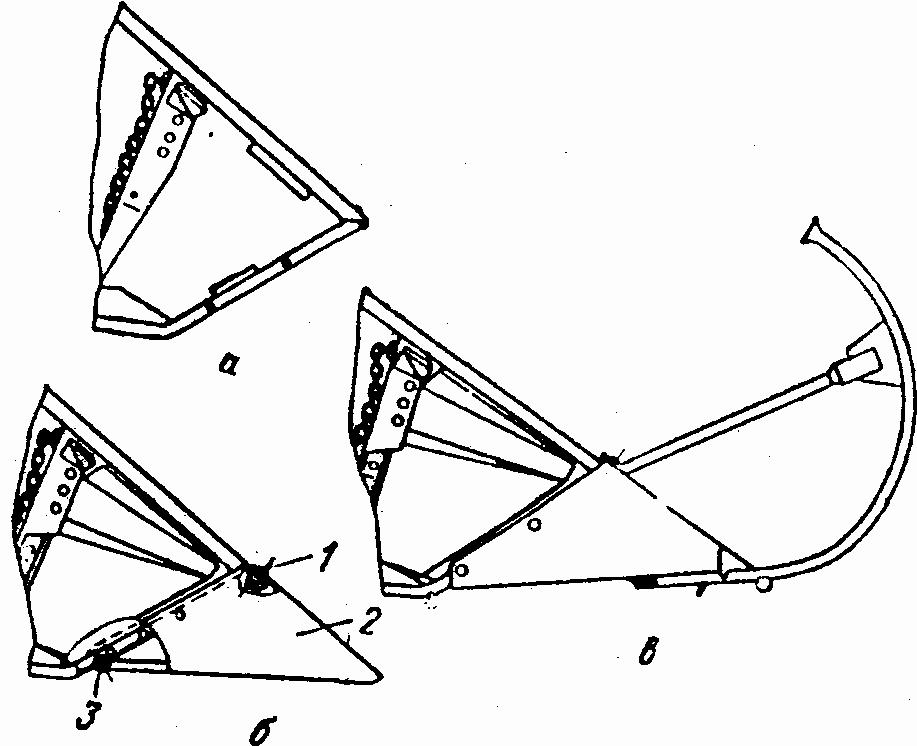
При
работе в обычных условиях устанавливают
носок 2. Прутковый делитель используют
при уборке полеглого и путаного хлебостоя.
При уборке низкорослого путаного
хлебостоя рекомендуется снять носок
(рис. 8.3 а). При уборке длинносоломистых
полеглых культур применяют торпедные
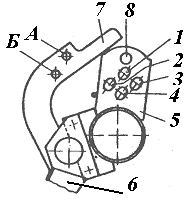
делители. Копирующие
башмаки. Корпус
жатки при работе опирается на копирующие
башмаки, установленные шарнирно в нижней
части жатки. На трубчатой балке установлены
две косынки 5 (рис. 8.4) с четырьмя отверстиями
(1,2,3,4). Башмаки снабжены рычагами 7 с
двумя отверстиями А и Б. Совмещением
отверстий на косынках и рычагах башмаков
меняют положение последних относительно
платформы жатки.
Рис. 8.4. Установка
копирующих
1,2,3,4–
отверстия
на косынке; 5 –
косынка;
6 – башмак;
7– рычаг;
А и Б –
отверстия
на рычаге; Н–
высота
среза стеблей

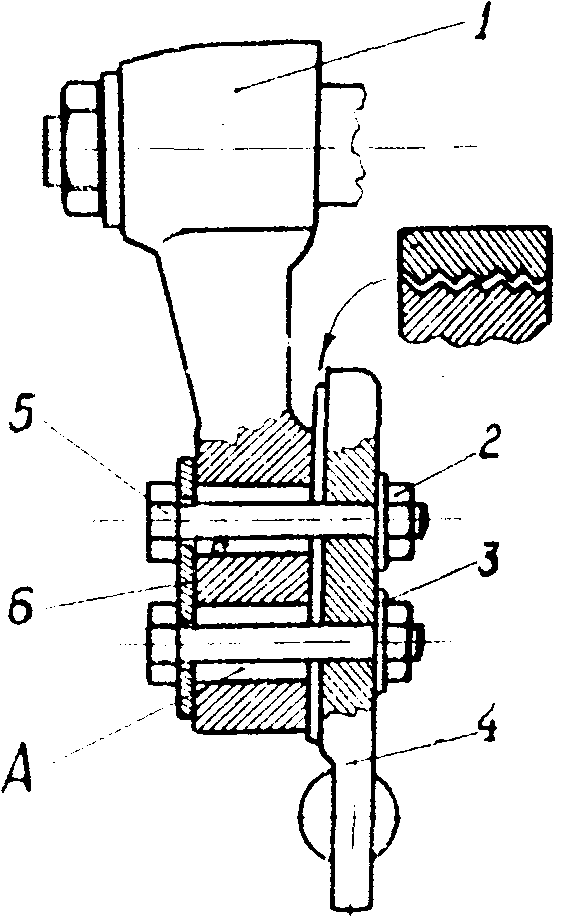
Механизм
уравновешивания корпуса жатки
состоит из двух рычажно-пружинных
систем, расположенных на корпусе жатки
по обе стороны от проставки. Каждая
система состоит из пружинного блока 2
(или 6) (рис. 8.5), рычага 12, подвески 11 (или
4). Подвеска 4 сделана регулируемой для
выравнивания корпуса жатки при монтаже
ее с наклонной камерой (проставкой).
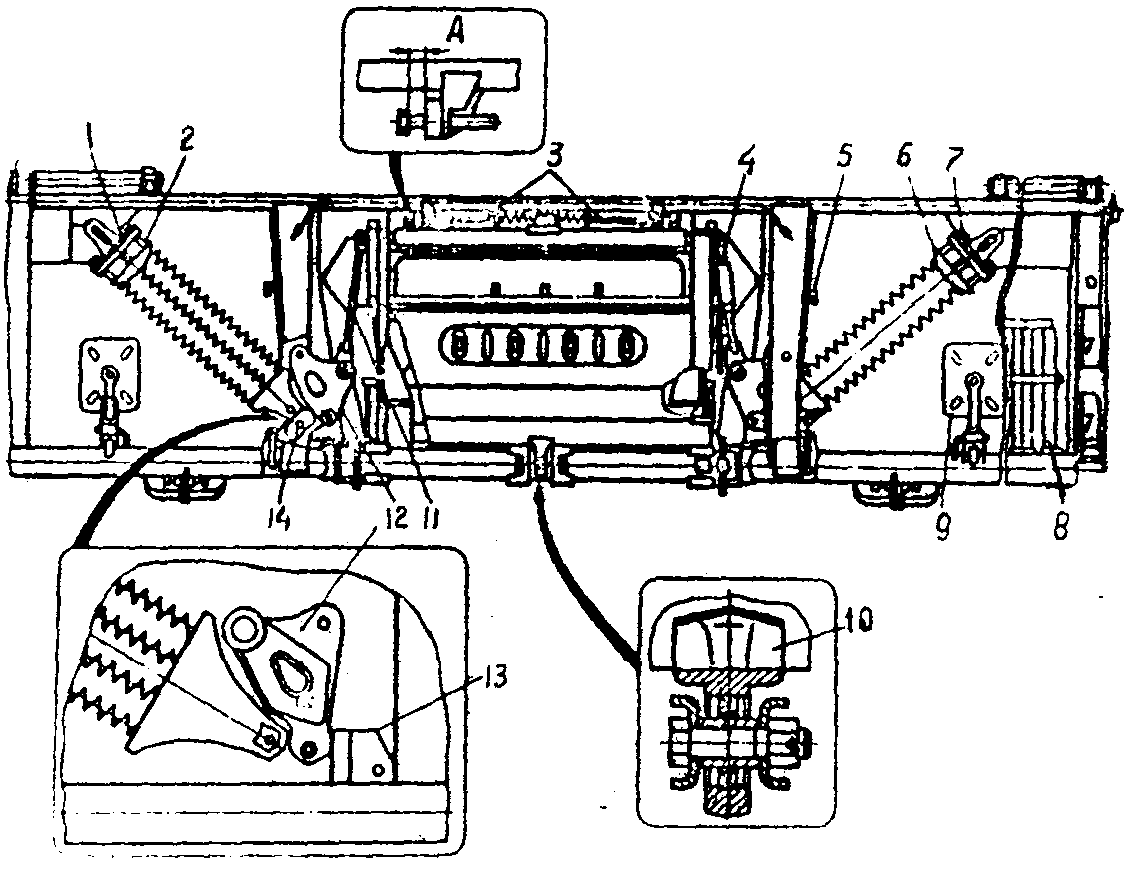
Рис.
8.5. Жатка с проставкой (вид сзади):
1
и 7 – натяжные болты; 2 и 6 – пружинные
блоки; 3 – растяжка; 4 − регулируемая
подвеска; 5 –штырь; 8 – сошки; 9 – домкрат
винтовой; 10 − центральный шарнир; 11 –
левая подвеска; 12 – рычаг; 13 – кронштейн;
14 − переходное звено; А – зазор (8 мм)
между головкой растяжки и опорой
При
работе жатки с помощью механизма
уравновешивания можно задавать следующие
режимы работы: с копированием на башмаках,
без копирования (высоту среза изменяют
гидроцилиндрами) и транспортное
положение.
Рис. 8.6. Положение
механизма уравновешивания жатки:
а
– работа с копированием рельефа поля;
б – при работе без копирования рельефа
поля; в – при стыковке (расстыковке)
наклонной камеры; 1 – штыри; 2 – стойка;
3 – рычаг;
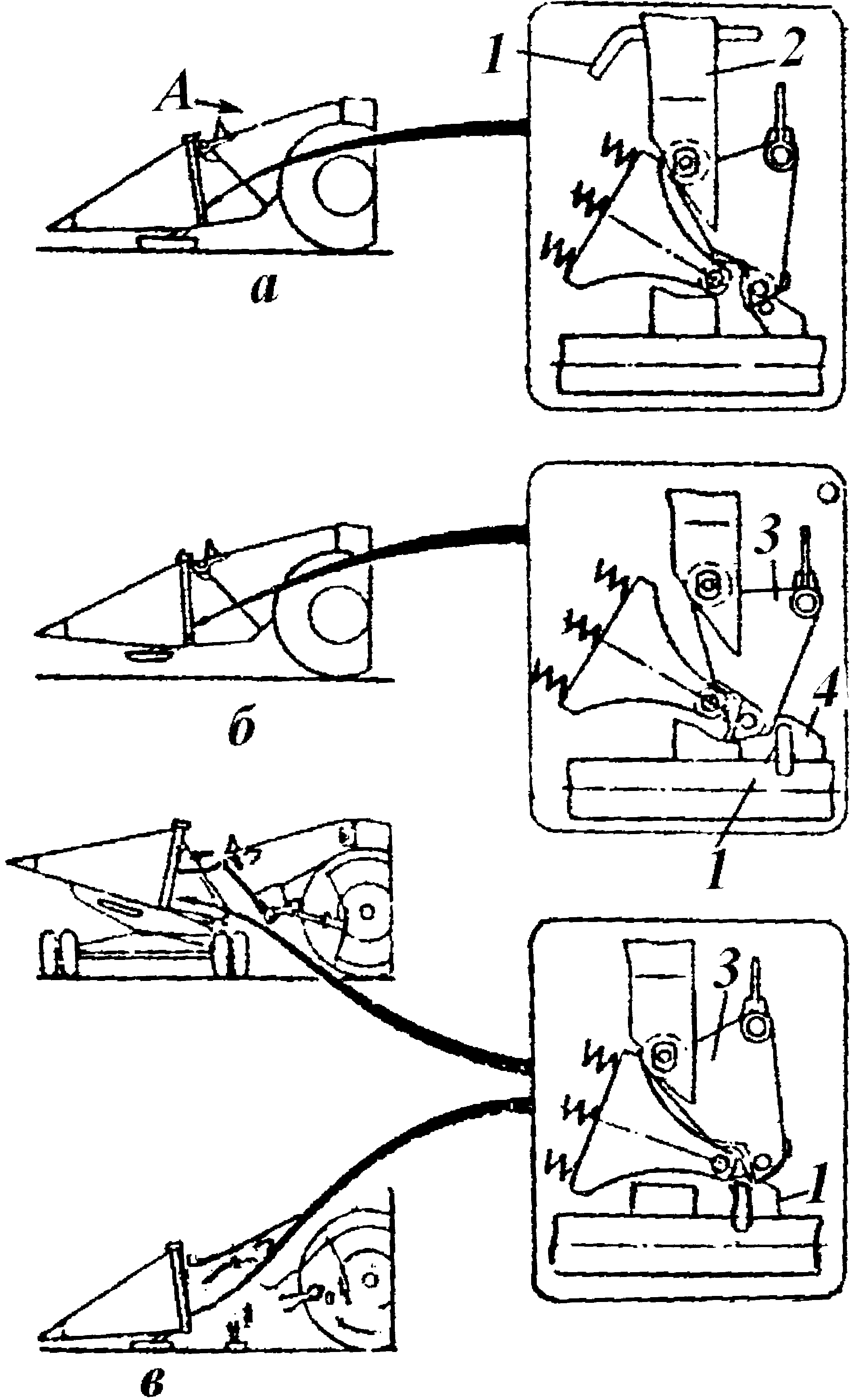
При
транспортном положении, а также при
стыковке и расстыковке штырь 1 ставят
также в отверстие кронштейна 4, но при
поднятой жатке, тем самым блокируя
уравновешивающий механизм жатки.
Режущий
аппарат
предназначен для срезания хлебной
массы. Он состоит из пальцевого бруса
2 (рис. 8.7) и ножа 3. Пальцевый брус содержит
специальный уголок 7, к которому
болтами крепятся пальцы 13. Шаг пальцев
бруса и сегментов ножа во всех типах
режущих аппаратов равен 76,2 мм, а ход
ножа – 88 мм. На жатке комбайна могут
устанавливаться режущие аппараты с
пальцами без противорежущих вкладышей,
с пальцами открытого типа с противорежущими
вкладышами, а также с пальцами закрытого
типа и противорежущими вкладышами.
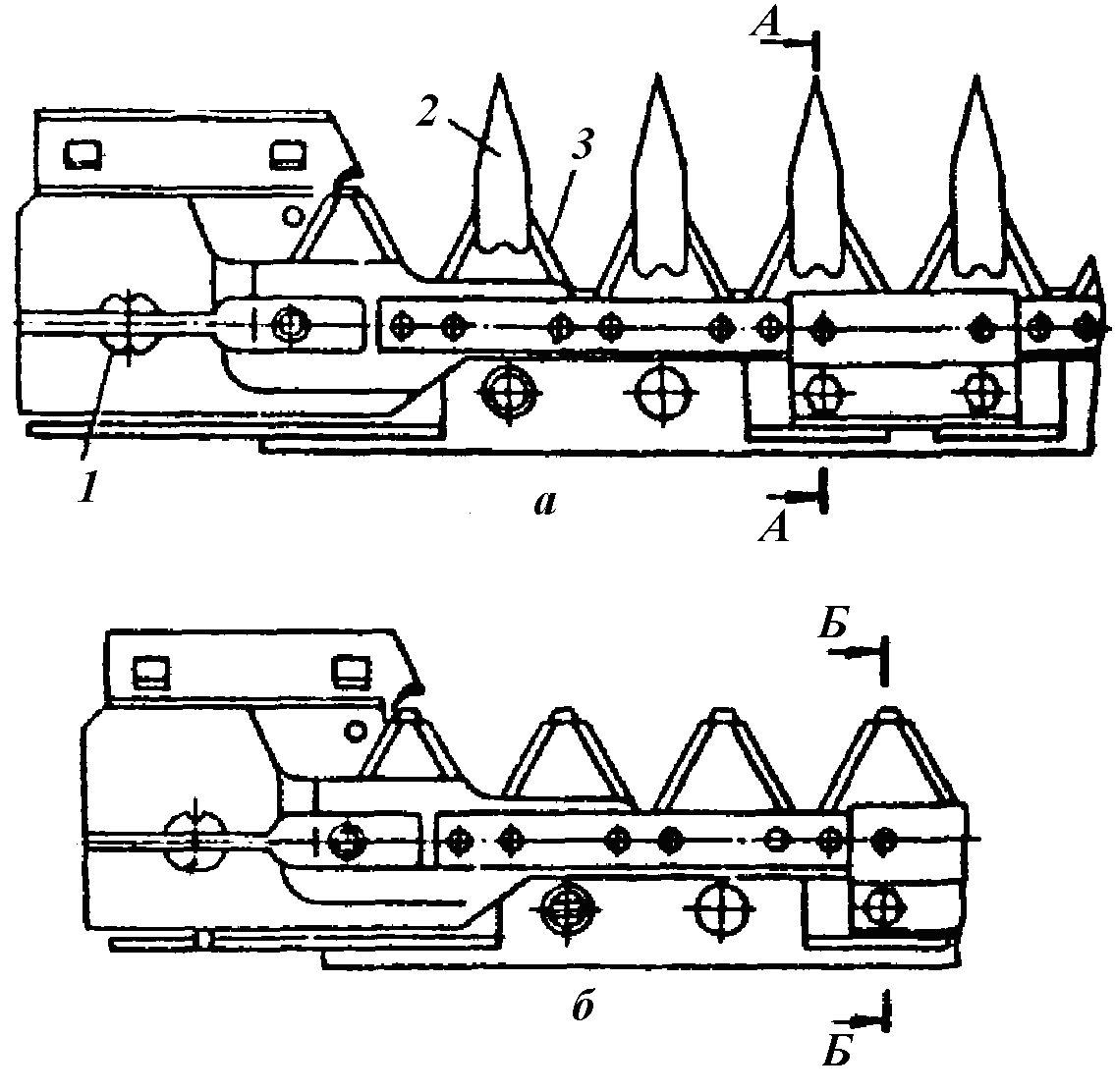
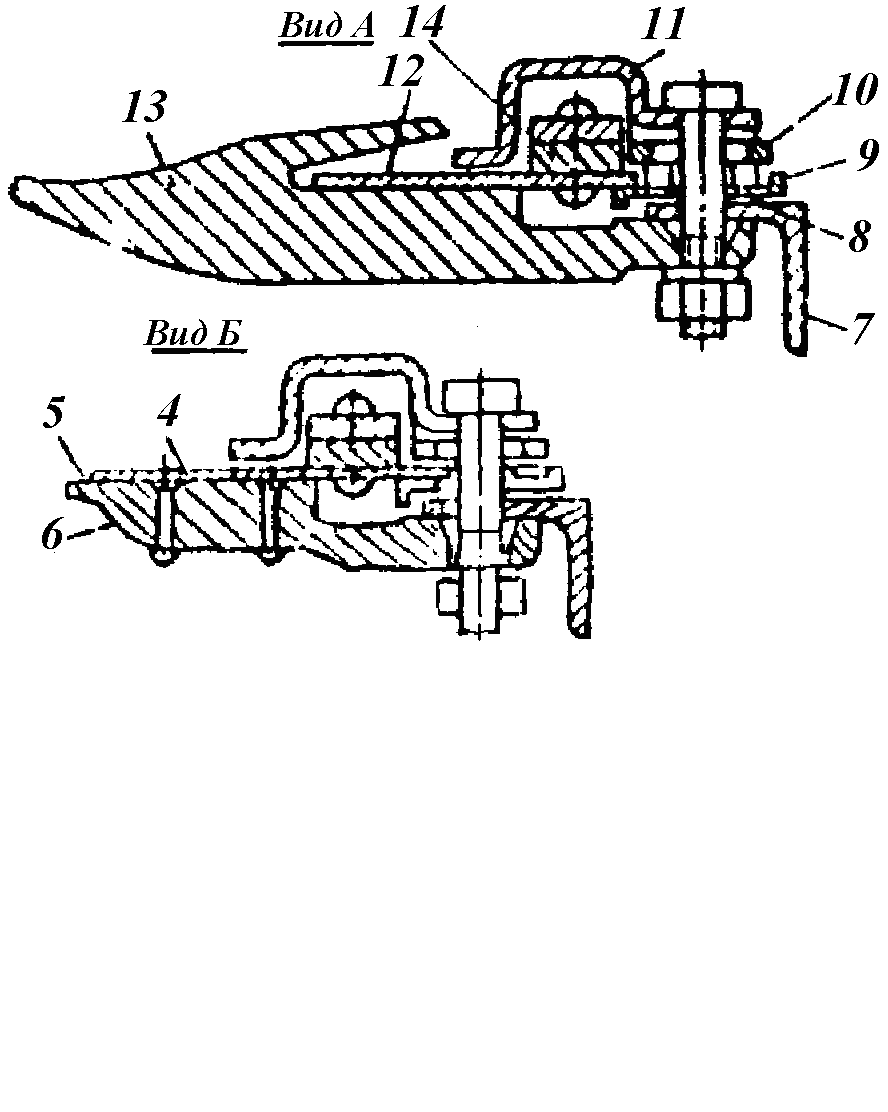
Рис.
8.7. Режущий аппарат:
а
– режущий аппарат с пальцами закрытого
типа; б – режущий аппарат с пальцами
открытого типа; 1 – головка ножа; 2 –
пальцевый брус; 3 – нож; 4 и 12 – сегменты
ножа; 5 – вкладыш; 6 – палец открытого
типа; 7 – уголок; 8 – прокладка; 9 и 10 –
пластины трения; 11 – прижим; 13 – палец
закрытого типа; 14 – спинка ножа
Сегментный
нож состоит
из головки 1 с запрессованным и приваренным
к ней шаром спинки ножа, выполненной из
полосовой стали сечением 24х6 мм и
приклепанных к ней сегментов 12 с режущими
кромками, имеющими верхнюю насечку.
Сегменты приклепаны к спинке ножа снизу
и выступают за нее на 5,5 мм. Выступающей
частью сегментов нож опирается на
пластины трения 9 и 10, что улучшает
фиксацию ножа в пальцевом брусе. Под
пластинами трения установлены
регулировочные прокладки. Сверху нож
удерживается прижимами 11.
Привод
ножа режущего
аппарата осуществляется от контрпривода
вала жатки клиноременной передачей и
механизмом качающейся шайбы. Механизм
привода обеспечивает 473 двойных хода
ножа в минуту.
Механизм
качающейся шайбы состоит из корпуса 3
(рис. 8.8), шкива-маховика 1, ведущего
(коленчатого) вала 2, водила (шайбы) 10,
выходного вала 5 и рычага 4. Ведущий вал
5 кинематически связан с выходным валом
1 посредством подшипников 8, водила 10 и
пальцев 9. Водило установлено на пальцах
9 с помощью игольчатых подшипников.
Коленчатый вал установлен в корпусе на
двух подшипниках 12 и 13, расположенных
на одной оси.
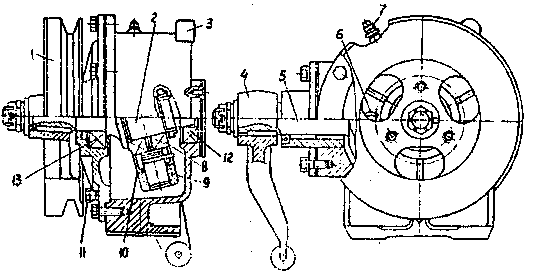
Рис.
8.8. Механизм качающейся шайбы:
1
− шкив-маховик; 2 − ведущий вал: 3 –
корпус;
4
– рычаг; 5 – выходной вал; 6 – пробка
отверстий для контроля уровня масла; 7
– сапун; 8,12 и 13 − подшипники; 9−палец;
10 −качающаяся шайба (водило); 11− пробка
сливного отверстия
Приводной
рычаг механизма качающейся шайбы
выполнен из основания 1 (рис. 8.9) и съемной
головки 4, соединенных между собой
болтами.
Рис. 8.9. Приводной
рычаг механизма качающейся шайбы:
1
– рычаг; 2 – гайка; 3 и
6
– шайбы; 4 – головка;
5
– болт; А – круглое отверстие
Головка
снабжена шаровым шарниром, который
соединяется серьгой с головкой ножа.
Съемная головка может перемещаться
относительно основания в продольном
и поперечном направлениях, для чего в
основании выполнены отверстия А
большого диаметра. Для предотвращения
излома на прилегающих поверхностях
выполнены рифы.
Механизм
качающейся шайбы работает следующим
образом. При вращении вала 2 (рис. 8.8)
отогнутая его часть описывает конус.
Установленное на нем водило совершает
колебательное движение, которое через
пальцы 9 передается вилке вала 5 и головке
рычага 4 и далее ножу.
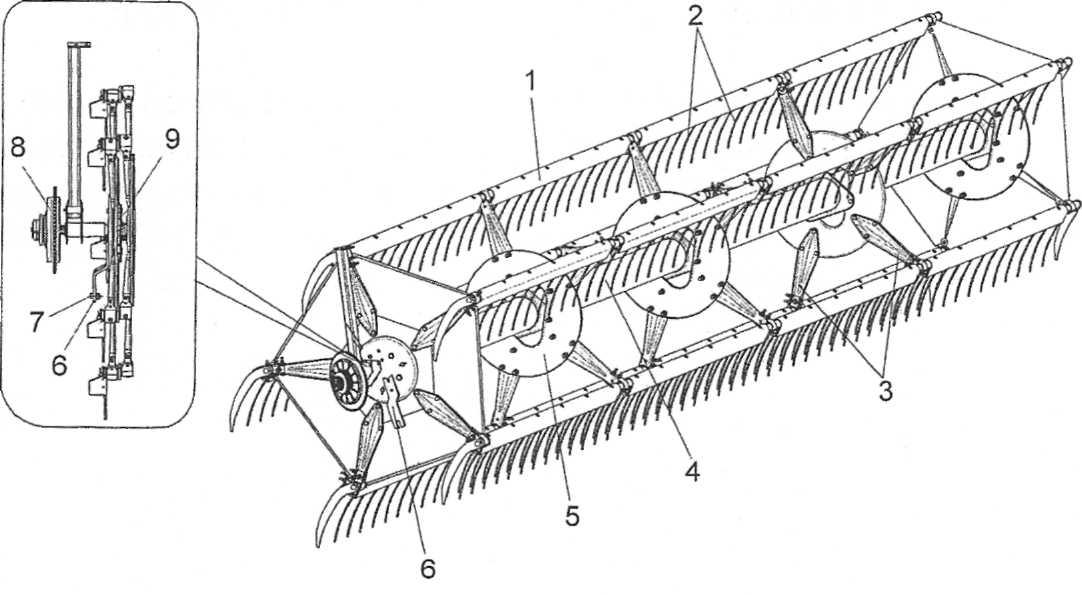
Мотовило
жатки (рис. 8.10) предназначено для подвода
стеблей убираемой культуры к режущему
аппарату, подачи срезанных стеблей к
шнеку жатки, создания подпора стеблей
(при уборке хлебов с высоким хлебостоем).
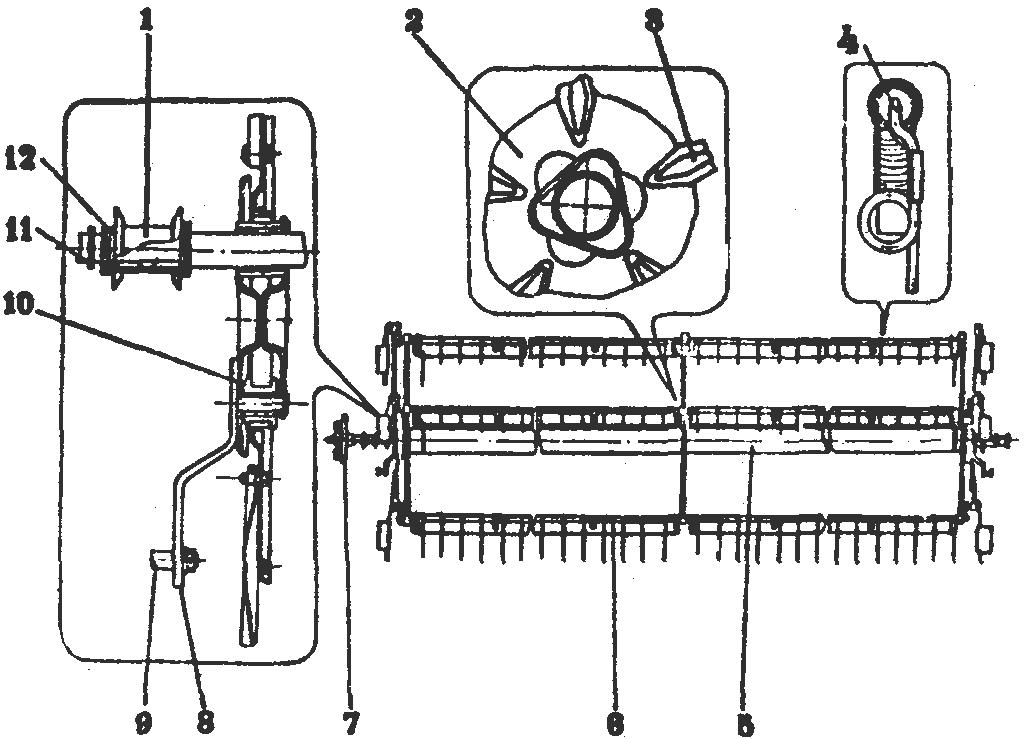
Рис. 8.10. Мотовило:
1
− подшипник; 2 − диск; 3 − луч; 4 − граблина;
5−центральная труба; 6 − труба
граблины; 7 − приводная звездочка с
предохранительной муфтой; 8 − поводок;
9 − палец; 10 − эксцентриковый механизм;
11 − стопорное кольцо; 12 − пакет
регулировочных шайб
На
жатке комбайна «Дон-1500» устанавливается
эксцентриковое мотовило, способное
удовлетворительно работать при скашивании
прямостоячих, путаных и полеглых хлебов.
Мотовило
комбайна «Дон-1500» без шпренгелей
с центральной трубой увеличенного
диаметра с двухсторонним эксцентриковым
механизмом, с усиленными пальцами
граблин увеличенной длины. На жатках с
шириной захвата 5, 6 и 7 м пальцы пружинные,
а на жатках с шириной захвата 8,6 м пальцы
жесткие, а лопасти съемные.
Мотовило
состоит из центральной трубы 5 с фланцами,
к которым прикреплены диски 2 с лучами
3. На концах лучей шарнирно установлены
граблины. Трубчатый вал мотовила
заканчивается цапфами, которыми он
опирается на подшипники, закрепленные
на ползунах. На цапфах (слева и справа)
установлены эксцентриковые механизмы
10. На левой цапфе вала установлена
ведущая звездочка 7 с фрикционной
предохранительной муфтой.
Граблина
мотовила представляет собой трубчатый
вал с пружинными пальцами. На концах
трубчатых валов имеются кривошипы,
которые шарнирно закреплены на лучах
эксцентриковых механизмов 10. Он
обеспечивают заданный угол наклона
граблин при работе мотовила.
Эксцентриковые
механизмы обеспечивают заданный угол
наклона граблин при работе мотовила.
Он содержит диск с лучами, установленный
на роликовой опоре.
Роликовая
опора состоит из основания с установленными
на ней тремя роликами, по которым
перекатывается диск с лучами. Роликовая
опора установлена эксцентрично
относительно вала мотовила и связана
поводком с копиром, закрепленным на
поддержке мотовила.
При
перемещении мотовила по поддержкам
ролик поводка перемещается по копиру,
автоматически изменяя угол наклона
граблин от 15° вперед до 30° назад.
Мотовило
установлено на левой и правой поддержке,
поднимается двумя синхронно действующими
гидроцилиндрами, а выдвигается также
двумя синхронно работающими гидроцилиндрами,
связанными с рычажным механизмом выноса
мотовила в зависимости от высоты его
расположения.
Привод
мотовила
должен обеспечивать такой режим работы,
при котором будет устойчивая активная
подача стеблей к режущему аппарату
независимо от скорости движения комбайна.
Для активной подачи стеблей к режущему
аппарату окружная скорость граблин
мотовила должна быть больше поступательной
скорости движения комбайна. Чем больше
эта разность, тем активнее мотовило
будет подавать стебли к режущему
аппарату. Однако с увеличением скорости
вращения мотовила увеличивается сила
удара граблин о колосья, а, следовательно,
возрастают потери зерна от выбивания.
Ведущий
шкив включает вал 8 (рис. 8.11), установленный
на подшипниках в корпусе 7, подвижный 5
и неподвижный 4 диски, гидроцилиндр 1 с
подводящим штуцером 2.
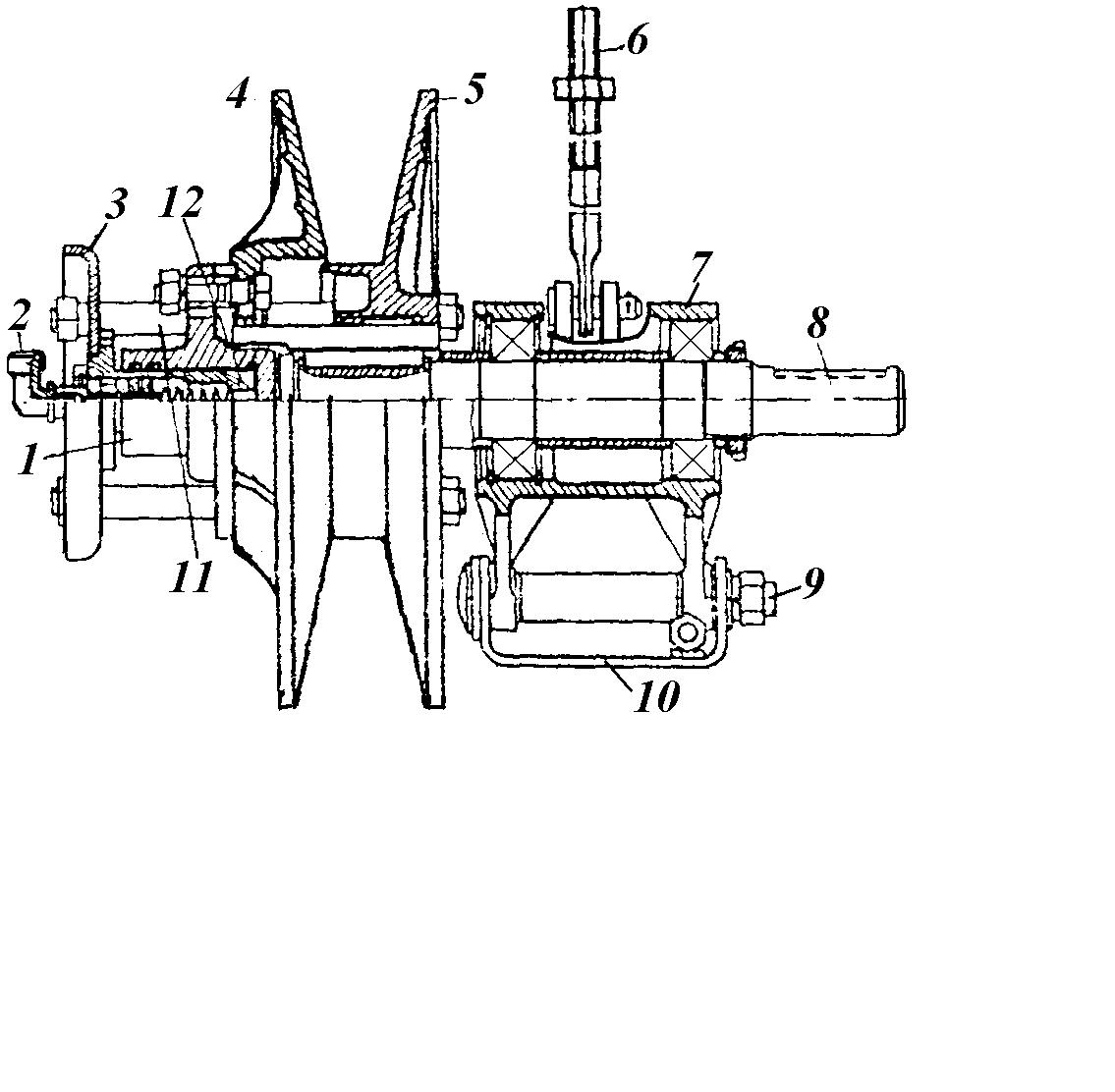
Рис.
8.11. Ведущий шкив вариатора мотовила:
1 − гидроцилиндр;
2 − штуцер; 3 − обойма; 4 и 5 − неподвижный
и подвижный диски; 6 − натяжной винт; 7
− корпус; 8 − вал; 9 − ось;
10
− плита; 11 − шпилька; 12− плунжер
гидроцилиндра
Гидроцилиндр
1 прикреплен к диску 4. На плунжере
гидроцилиндра установлена обойма 3,
связанная шпильками 11 с подвижным диском
5. Корпус 7 шарнирно соединен с плитой
10 осью 9, что позволяет поворачивать
ведущий шкив, менять межцентровое
расстояние между шкивами при натяжении
ремня.
Ведомый
шкив состоит из оси 10 (рис. 8.12), на которой
на подшипниках установлена ступица 11.
К ступице прикреплен неподвижный диск
7 с пальцами 8. Подвижный диск 6 установлен
на ступице свободно и может перемещаться
в осевом направлении. Подвижный диск
поджимается к неподвижному пружиной
5. На шлицах ступицы 11 установлена
приводная звездочка 1, передающая
вращение мотовилу.
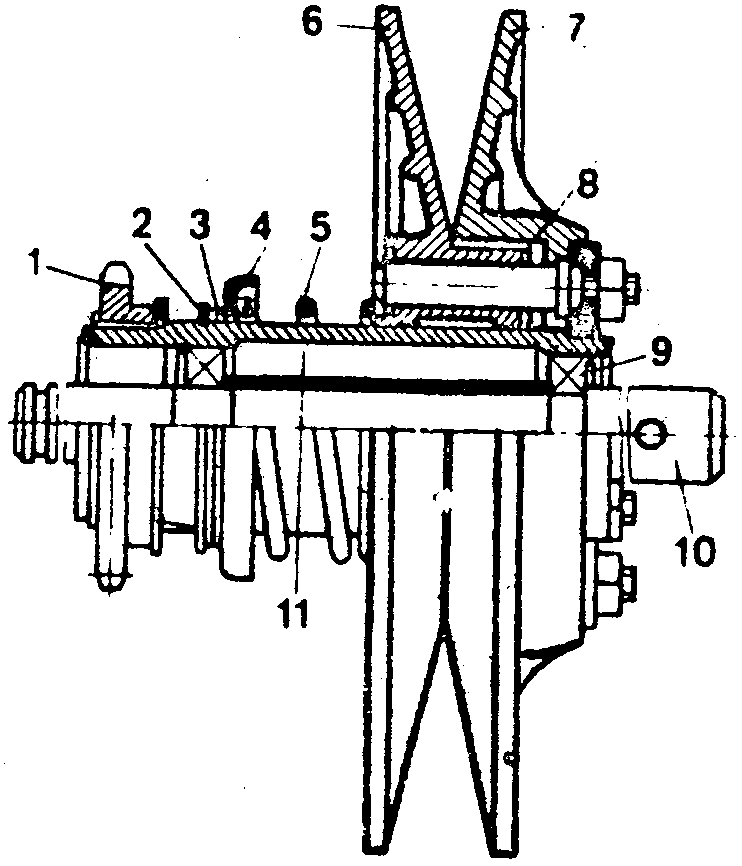
Рис.
8.12. Ведомый шкив вариатора мотовила:
1−
звездочка; 2 − замковое кольцо; 3 −
регулировочные шайбы; 4 − обойма; 5 −
пружина; 6 и 7 − подвижный и неподвижный
диски; 8 − палец;
9 − подшипник; 10 −
ось;
Вариатор
работает следующим образом. При
подаче масла в гидроцилиндр 1
(рис. 8.11)
плунжер 12
выдвигается, воздействуя через обойму
3 и шпильки 11 на подвижный диск 5, приближая
его к неподвижному. В результате
сближения дисков ремень перемещается
на больший диаметр. На ведомом шкиве
ремень перемещается на меньший диаметр
и отодвигает подвижный диск 6 (рис. 8.12)
от неподвижного 7, сжимая пружину 5.
Частота вращения мотовила увеличивается.
При сливе масла из гидроцилиндра пружина
5 ведомого шкива приближает подвижный
диск 6 к неподвижному 7. В результате
ремень выдавливается на больший диаметр,
а на ведущем шкиве он перемещается
на меньший диаметр, что обеспечивает
уменьшение частоты вращения мотовила.
Изменение частоты вращения возможно
только при включенном приводе мотовила.
Шнек
предназначен для транспортировки
срезанной хлебной массы к центру жатки
и подачи ее в проставку. Он состоит из
цилиндрического корпуса 5 (рис. 8.13) на
поверхности которого приварены спиральные
ленты 6 и 16 левого и правого направлений.
В центре корпуса против окна находится
четырехрядный пальчиковый механизм 7,
на левом конце – реверсивный редуктор
3 с приводной звездочкой 1 и предохранительной
фрикционной муфтой. Вместо редуктора
на шнеке может быть установлена цапфа.
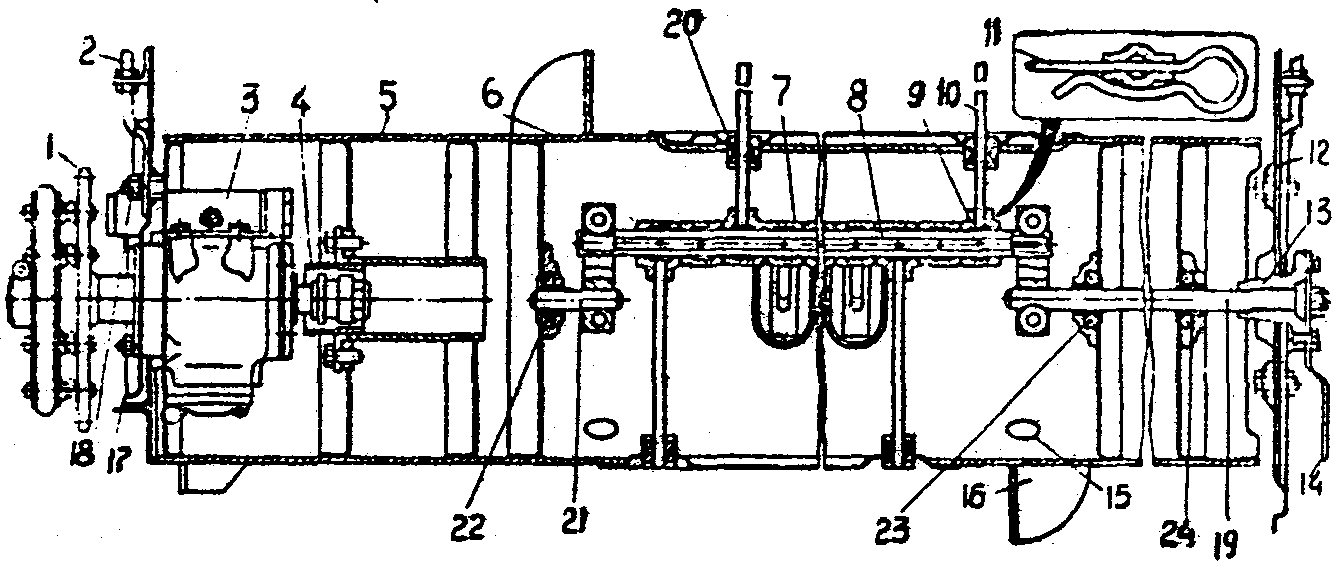
Рис. 8.13. Шнек жатки
с редуктором:
1
− звездочка; 2 − болт подвески шнека; 3
− реверсивный редуктор; 4 − соединительная
втулка; 5 − корпус шнека; 6 и 16 − спираль
шнека; 7 − пальчиковый механизм; 8 − ось;
9 − втулка пальца; 10 − палец; 11 −
быстросъемный шплинт; 12 и 17 − плиты; 13
− втулка;14 − рукоятка; 15 − отверстие
для доступа к масленке; 18 − болт; 19−осъ;
20 − обойма пальца с глазком; 21 − цапфа;
22, 23 и 24 – подшипники
Пальчиковый
механизм представляет собой коленчатую
неподвижную ось 8, на которой установлены
втулки 9 с пальцами 10. На корпусе шнека
закреплены четыре ряда обойм 20 с
пластмассовыми глазками, через которые
пальцы выходят наружу.
Коленчатый
вал состоит из оси 19, цапфы 21, установленных
в корпусе на подшипниках 22, 23 и 24, трубчатой
оси 8, смещенной от центра на 68 мм.
Трубчатая
ось 8 связана с цапфой 21 и осью 19 двумя
щечками. Конец оси 19 выведен наружу с
правой стороны жатки и снабжен рукояткой
14, поворотом которой можно изменять
зону выхода пальцев из корпуса шнека.
Ось
19 и реверсивный редуктор 3 (либо цапфа)
закреплены на плитах 12 и 17, которые могут
перемещаться вместе со шнеком относительно
днища жатки с помощью болтов 2.
Приводится
шнек в действие от контрприводного вала
цепной передачей через предохранительную
фрикционную муфту, отрегулированную
на передачу крутящего момента 600 Нм (60
кгс∙м).
Реверсивный
редуктор
предназначен для вращения шнека в
прямом (рабочем) и обратном направлениях
(при забивании). Он состоит из корпуса
11 (рис. 8.14), шлицевого вала 2, вала-шестерни
1, шестерен 8, 10 и 12, муфты 6, вилки 4 и
гидроцилиндра 7. Шестерни редуктора
находятся в постоянном зацеплении.
Направление вращения вала 2 зависит от
положения муфты 6.
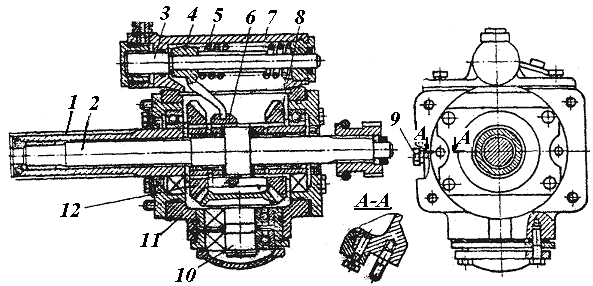
Рис. 8.14. Реверсивный
редуктор привода шнека:
1
− вал-шестерня; 2 − вал; 3 − шток
гидроцилиндра; 4 − вилка; 5 − пружина; 6
– муфта; 7 − корпус гидроцилиндра; 8, 10
и 12 − шестерни;
9
– контрольная пробка; 11 – корпус
редуктора
В
рабочем положении шнека вилка 4 под
действием пружины 5 удерживает муфту
6 в крайнем положении (как показано на
рисунке). В этом случае вал-шестерня 1
и шлицевой вал 2
соединены
муфтой 6 и вращаются в одном направлении.
Шестерня 8 вращается свободно на валу
2. При включении в действие гидроцилиндра
7 шток 3, сжимая пружину 5, перемещает
вилку 4 и муфту 6 в противоположное
крайнее положение, соединяя шлицевой
вал 2 с шестерней 8. В результате этого
вал 2 вращается через паразитную шестерню
10 в обратном направлении по отношению
к валу-шестерне 1.
Редуктор
можно переключать только при выключенном
приводе жатки. Проворачивать шнек в
обратном направлении следует на
пониженной частоте вращения коленчатого
вала двигателя.
Управление
образования Могилевского облисполкома
«Могилевский
государственный ордена Трудового
Красного Знамени профессиональный
агролесотехнический колледж
им. К. П. Орловского»
по выполнению
задания по теме:
«Машины для
уборки зерновых культур. Зерноуборочный
комбайн КЗС-1218»
Разработчик:
Григорович А. Г.
4.7. Регулировка
режущего аппарата.
9.
Соломоизмельчитель комбайна GS-12.
13.
Меры безопасности при работе на
зерноуборочном
При
движении комбайна по полю производится
сбор и подача убираемых растений на
последующую обработку. При прямом
комбайнировании растения срезаются и
собираются жаткой в слой определенной
толщины и плотности. При раздельном
способе подбирают ранее скошенные
валки, и также направляют массу для
обмолота и последующей сепарации.
Подающие
рабочие органы и устройства объединены
на жатке комбайна (рис. 2.1). Основной их
задачей является отделение убираемой
полосы от массива поля, подвод стеблей
к режущему аппарату 3, срезание и
равномерная подача на дальнейшую
обработку. В данном процессе участвуют
делители 2 и стеблеподъемники,
мотовило, режущий аппарат, шнек 4 с
пальцевым механизмом и транспортер
наклонной камеры.
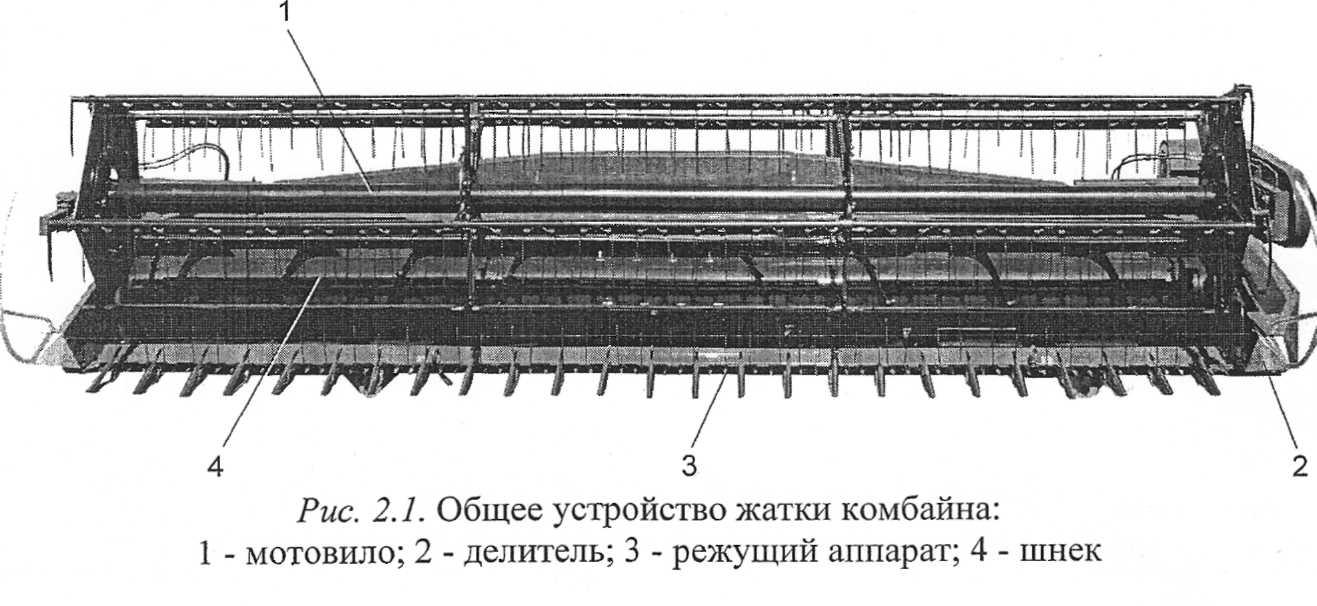
Наиболее
ответственную роль играет мотовило 1,
граблины которого захватывают
растения, подводят их к режущему аппарату
и сбрасывают срезанные стебли на
платформу жатки. Для достижения хорошего
качества обмолота и уменьшения
колебаний потребляемой мощности большое
значение имеет обеспечение равномерной
подачи убираемой массы на дальнейшую
обработку. Также необходимо обеспечить
устранение потерь зерна за жаткой.
Основным
процессом зерноуборочного комбайна
является вымолот зерна из колосьев
и их отделение от примесей. Молотильный
аппарат является «сердцем» любого
зерноуборочного комбайна (рис. 2.2).
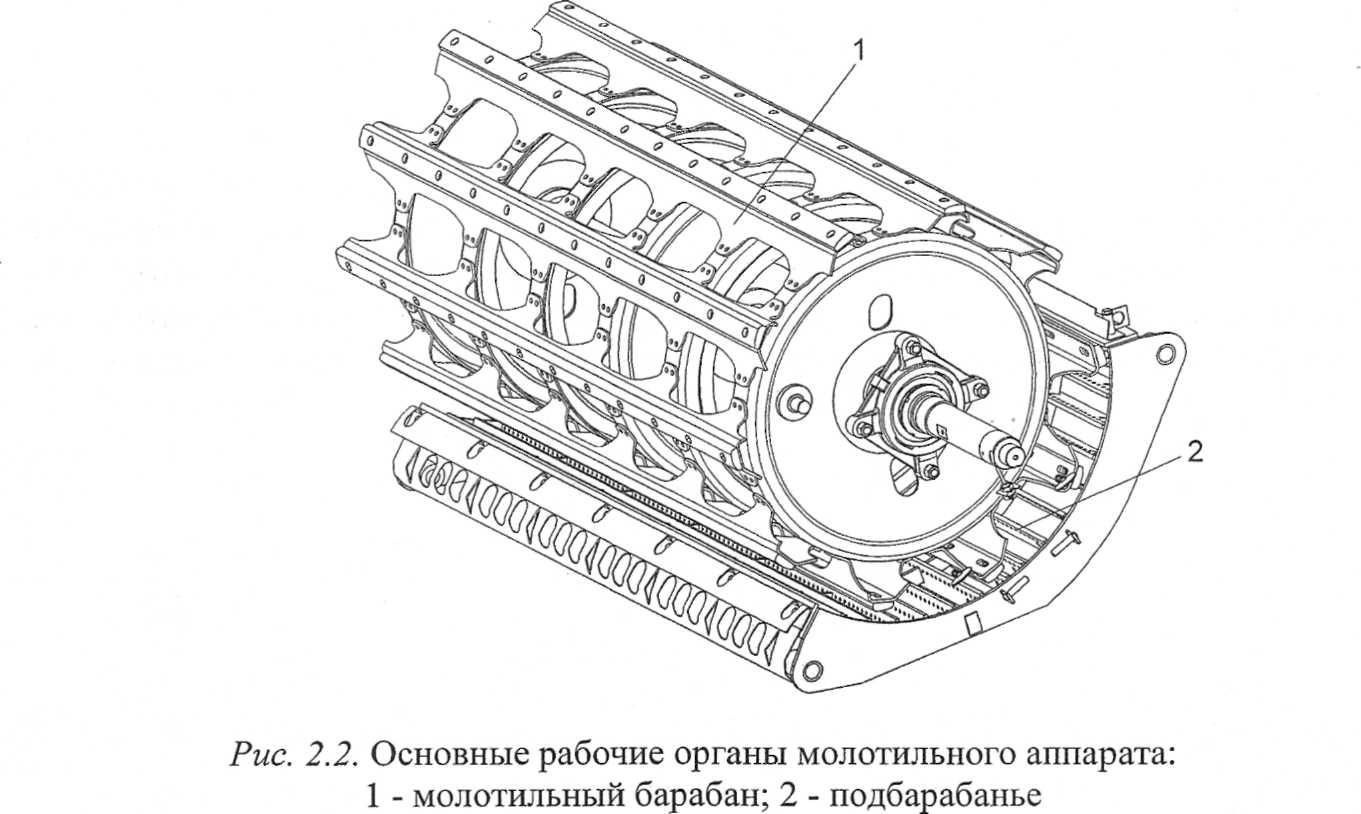
Вымолот
зерна осуществляется при многократных
ударных воздействиях бичей молотильного
барабана 1 (рис.2.2) по обмолачиваемой
массе. Киносъемка данного процесса
показала, что бичи при ударах изгибают
слой соломы. За счет более высокой
скорости движения бичи проходят над
слоем соломы, прижимая его к
подбарабанью 2, при этом обеспечивается
передвижение обмолачиваемого слоя.
Процесс движения соломистой массы
подобен тому, как ползет гусеница.
Наблюдается радиальная пульсация и
передвижение обмолачиваемого слоя
со следующими фазами: удар бича;
радиальная деформация слоя; волнообразное
движение в молотильном зазоре. За счет
отверстий в подбарабанье происходит
сепарация вымолоченного зерна и части
мелких примесей, и они подаются на
очистку, а солома с некоторым количеством
застрявших зерен (до 10%) поступает на
соломотряс.
Соломотряс
имеет колеблющиеся клавиши с жалюзийной
поверхностью (рис. 2.3). За счет специально
подобранного режима колебаний
обеспечивается постоянное ударное
воздействие клавиш на массу и ее
продольное перемещение вдоль
соломотряса.
Выделенное
клавишами зерно направляется на очистку,
а солома поступает на выход из
комбайна и укладывается в валок, или
измельчается и разбрасывается по
полю.
Очистка
комбайна имеет (рис.2.4) жалюзийные решета
1 и вентилятор 2. Решета отделяют от
зерна белее крупные примеси, а воздушный
поток вентилятора уносит легкие
частицы.
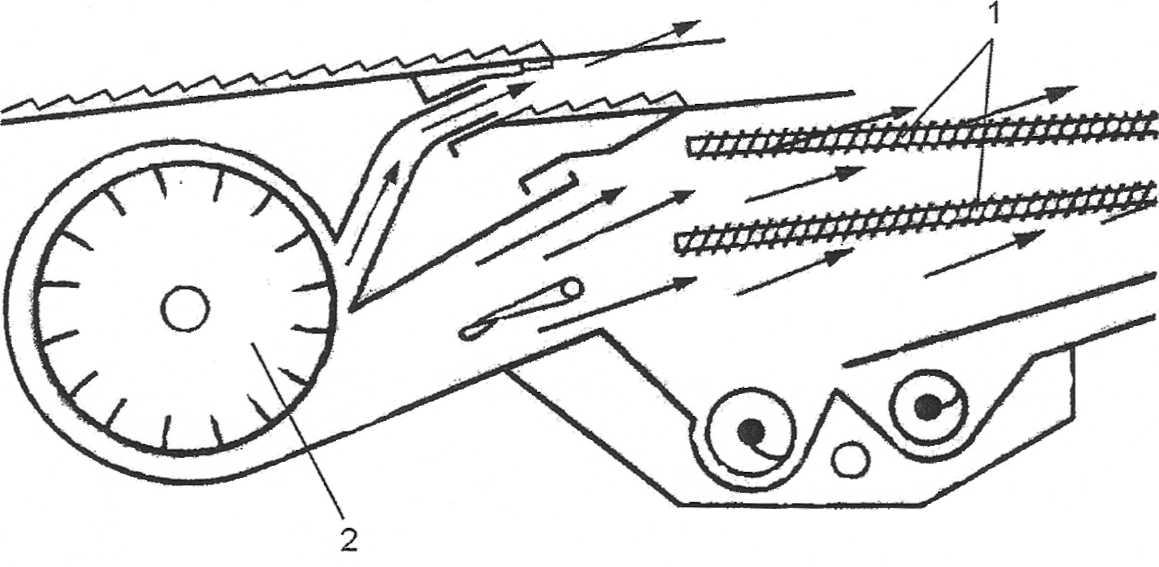
Рис.
2.4. Общее
устройство очистки комбайна: 1 — решета;
2 – вентилятор.
Очищенное
от примесей зерно шнеками и транспортерами
направляется в бункер комбайна, из
которого периодически отгружается.
Технологический
процесс прямого способа уборки урожая
комбайном осуществляется следующим
образом.
При
движении комбайна лопасти мотовила 22
(рис. 3.2) жатки для зерновых культур
захватывают и подводят порции стеблей
к режущему аппарату 21, а затем подают
срезанные стебли к шнеку 20. Пальчиковый
механизм шнека захватывает их и
направляет в окно жатки, из которого
масса отбирается к транспортеру
наклонной камеры 19, который подает
поток хлебной массы в молотильный
аппарат к барабану-ускорителю 18, а затем
к молотильному барабану 16. В процессе
обмолота зерно, полова и мелкий
соломистый ворох просыпаются через
решетку подбарабанья 17 на стрясную
доску 14, остальной ворох отбрасывается
отбойным битером 15, на соломотряс 4, на
клавишах которого происходит дальнейшее
выделение зерна из соломистого вороха.
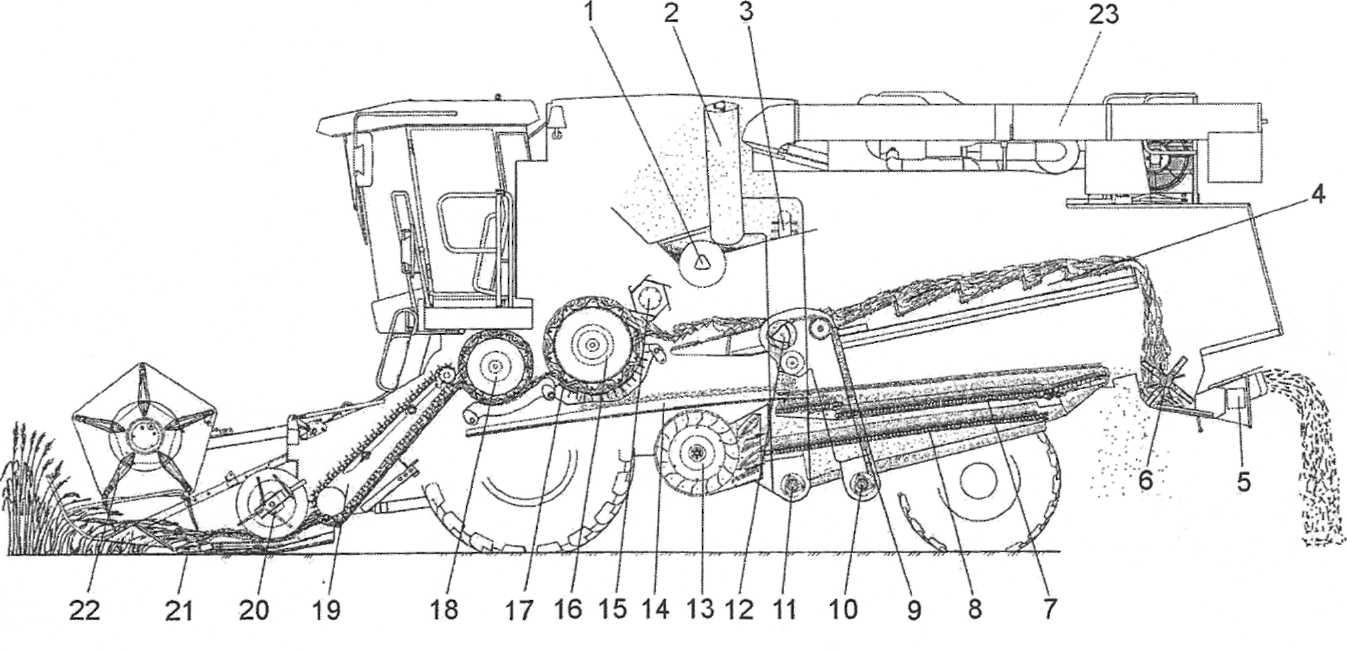
Рис.
3.2. Схема
технологического процесса работы
комбайна GS12:
I —
шнек горизонтальный; 2- шнек загрузной
зерновой; 3 — элеватор зерновой; 4 —
соломотряс; 5 — дефлектор; 6 —
соломоизмельчитель; 7 — верхний решетный
стан; 8 — нижний решетный стан; 9 — элеватор
колосовой; 10 — шнек колосовой;
II —
шнек зерновой; 12 — домолачивающее
устройство; 13 — вентилятор;
14 — стрясная
доска; 15 — отбойный битер; 16 — барабан
молотильный; 17 — подбарабанье; 18 —
барабан-ускоритель; 19 — транспортер
наклонной камеры; 20 — шнек;
21 — режущий
аппарат; 22 — мотовило; 23 — шнек выгрузной
Солома
транспортируется клавишами соломотряса
к заднему капоту, с которого в зависимости
от настройки соломоизмельчителя 6
формируется в валок или измельчается
ротором соломоизмельчителя 6 и через
дефлектор 5 разбрасывается по полю.
Полова
и легкие примеси воздушным потоком
вентилятора 13 выдуваются из очистки
на поле.
Зерновая
смесь, поступающая на стрясную доску
14, попадает на решетные станы очистки,
откуда очищенное зерно ссыпается через
поддон к шнеку зерновому 11 и загружается
в бункер элеватором зерновым 3 и шнеком
загрузным 2. После заполнения бункера
зерна выгружается в транспортное
средство шнеком выгрузным 23.
Процесс
раздельного способа уборки урожая при
работе обоих типов комбайнов отличается
от прямого тем, что стебельную массу
убираемой культуры сначала скашивают
в валки, а затем с помощью навешиваемого
на комбайн подборщика валки подбирают
и обмолачивают таким же образом, как
описано выше.
Устройство и работа основных рабочих органов и механизмов жатки для уборки зерновых культур комбайна gs12.
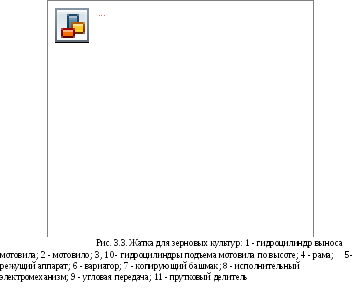
На
жатке установлены прутковые делители
11 (рис. 3.3), которые отделяют убираемую
полосу стеблей. В нижней части рамы
жатки 4 установлены копирующие башмаки
7, на которые жатка опирается при работе
с копированием рельефа поля, при
ремонте, хранении и обслуживании.
Башмаки могут быть установлены в одно
из пяти положений, обеспечивая необходимую
высоту среза стеблей.
Для
уменьшения пассивной зоны между режущим
аппаратом и шнеком и для предотвращения
попадания камней в молотильный аппарат
комбайна между режущим аппаратом и
шнеком установлен съемный отбойник.
Он необходим при уборке низкостебельных
культур.
В
процессе работы мотовила граблины 1
(рис. 3.4) могут занимать различное
положение от плюс 15° (наклон вперед при
прямостоящем стеблестое) до минус
30° (наклон назад при уборке полеглых
участков). Этот наклон граблин
обеспечивается автоматически благодаря
особой конфигурации копира, закрепленного
на поддержках, с которым взаимодействует
ролик 7 эксцентрикового механизма 9.
Эксцентриковый механизм обеспечивает
заданный (постоянный) наклон граблин
при вращении мотовила.
1
— граблина; 2 — зуб пружинный; 3 — луч; 4 —
вал мотовила; 5 — диск; 6 — поводок; 7 —
ролик; 8 — приводная звездочка с
предохранительной муфтой; 9 — эксцентриковый
механизм
Наклон
граблин изменяется автоматически при
перемещении мотовила в горизонтальном
направлении (при выносе мотовила).
Для
обеспечения нормального режима работы
жатки при различных условиях уборки
мотовило имеет следующие технологические
регулировки:
Управление
перемещением мотовила осуществляется
из кабины комбайна переключателем
на рукоятке управления скоростью
движения пульта управления.
Включение
и изменение частоты вращения мотовила
осуществляется с помощью клиноременного
вариатора 6, управляемого исполнительным
электромеханизмом 8.
Привод
режущего аппарата осуществляется от
угловой передачи 9 (рис. 3.3).
На
шнеке имеются витки левого и правого
направлений, которые выполняют
функции транспортера. Пальчиковый
механизм предназначен для подачи
стеблевой массы на цепочно-планчатый
транспортер наклонной камеры
комбайна. Управление пальчиковым
механизмом производится рычагом,
расположенным на правой боковине жатки.
Стеблеподъемники
служат для разделения и подъема путанных
и полеглых стеблей убираемой культуры
перед их скашиванием. Стеблеподъемники
крепятся на пальцах режущего аппарата.
Тележка
предназначена для транспортирования
жатки. Крепится жатка на тележке с
помощью четырех зацепов. При транспортных
переездах комбайна тележка, с установленной
на ней жаткой, присоединяется к молотилке
при помощи тягового устройства.
Жатки зерноуборочных комбайнов
Жатка — машина для скашивания сельскохозяйственных культур и транспортирования скошенной массы к молотилке комбайна (при прямом комбайнировании) или для укладки скошенной массы в валок (для раздельной уборки).
В основе принципа действия жатки лежит технологическая операция скашивания (срезания) стеблей растений. Это техническое решение является для жатки классическим, но не единственным. Существуют жатки, которые обмолачивают растения на корню без срезания стеблей, так называемые жатки очёсывающего типа.
Жатка, агрегатируемая с комбайном, может быть платформенной или шнековой.
Платформенная жатка используется только для скашивания культур, т. е. применяется при раздельном способе уборки.
Шнековая жатка может использоваться как для прямого комбайнирования, так и для раздельного способа уборки. При раздельном способе для скашивания убираемой культуры в валок на жатке задействованы режущий аппарат, мотовило, и устанавливается ленточный транспортёр с деревянными планками, перемещающий срезанную массу к выбросному окну. При подборе валков устанавливается подборщик и задействуются шнек и наклонная камера (режущий аппарат и мотовило при этом не используются).
Основные рабочие механизмы жатки прямого комбайнирования: мотовило, режущий аппарат, шнек и наклонная камера (наклонный транспортер). К дополнительным устройствам относятся механизмы копирования поверхности поля, подвески и уравновешивания жатки, а также боковые делители.

Мотовило подводит стебли срезаемых растений к режущему аппарату и удерживает их во время срезания. Затем продвигает хлебную массу вглубь платформы. При уборке полёглых хлебов мотовило выдвигается вперёд и опускается ниже, за счёт этого пружинные пальцы мотовила приподнимают колосья и удерживают их вплоть до срезания. На зерноуборочных комбайнах могут применяться универсальные эксцентриковые, планчатые и копирующие мотовила.
Конструкция универсального мотовила отличается эксцентричным расположением обоймы подшипников относительно оси вала, при этом пальцы граблин совершают плоскопараллельное перемещение, что позволяет эффективнее захватывать полеглые стебли. Планчатое мотовило обычно устанавливают на валковых жатках и при скашивании прямостоячих хлебов.
Конструкция копирующего мотовила обеспечивает эффективный захват стеблей и их перемещение к режущему аппарату и далее к шнеку, при этом почти не образуется «мертвых зон», где может скапливаться скошенная масса. Это обеспечивается формой беговой дорожки, смонтированной в обойме вала, благодаря чему планки мотовила перемещаются по заданной криволинейной траектории, копирующей пространство между днищем жатки, режущим аппаратом и шнеком. Такое мотовило хорошо очищает режущий аппарат от скошенных стеблей, эффективно подает стебли к режущему аппарату и далее к шнеку, а также уменьшает потери урожая.
Режущий аппарат жатки срезает стебли по принципу ножниц. Неподвижные пальцы выполнены из чугуна или стали, на них установлены противорежущие пластины. Подвижный нож жатки набран из треугольных пластин-сегментов. Срезание происходит за счёт возвратно-поступательных движений ножа, при этом острые режущие кромки сегментов перерезают стебли. Преобразование вращательного движения привода в возвратно-поступательное движение ножа обычно осуществляется при помощи кривошипно-шатунного механизма или качающейся шайбы.

В режущих аппаратах современных зерноуборочных комбайнов широко применяют конструкции, называемые режущими аппаратами системы Шумахера. Особенностью конструкций аппаратов Шумахера является применение оригинального планетарного редуктора для преобразования вращательного движения привода в возвратно-поступательное движение ножа, а также размещение сегментов на ноже с чередованием поверхности заточки режущей кромки (см. изображение).
Такое техническое решение позволяет значительно снизить вертикальные нагрузки на нож, поскольку срезаемые стебли воздействуют на сегменты с двух сторон (со стороны скоса режущих кромок). Кроме того, продляется срок службы пальцев до очередной заточки, поскольку их можно поменять местами с соседними пальцами (обычно пальцы закреплены попарно или даже по три). При этом пассивные кромки пальцев становятся рабочими, т. е. режущими.
Устройство и работу режущего аппарата типа Шумахера можно посмотреть на видеоролике в конце страницы.
Шнек предназначен для сбора скошенной массы в средней части жатки и подачи ее в плавающую наклонную камеру (к наклонному транспортеру). Достигается это размещением на цилиндрическом корпусе шнека винтовых лент (спиралей Архимеда), которые навиты с левой и правой стороны корпуса в противоположном направлении для сбора скошенной массы к центру.
Средняя часть корпуса шнека оснащена пальцевым механизмом для захвата стеблей и подачи их в наклонную камеру. При этом пальцы в корпусе перемещаются по сложной траектории и могут выдвигаться наружу, захватывая стебли, а затем входят в корпус, освобождая их.
Плавающий транспортер (наклонный транспортер, наклонная камера) служит для транспортировки хлебной массы от шнека к приемной камере молотильного устройства. Он состоит из ведущего и ведомого валов, на которых установлены по три звездочки с втулочно-роликовыми цепями и стальными планками, прикрепленными к цепям в шахматном порядке. Ведомый вал транспортера подвешен в корпусе на пружинах и может приспосабливаться к толщине слоя стеблей.
Делители служат для отделения срезаемых стеблей от хлебного массива и подвода крайних стеблей к ножу жатки. При уборке короткостебельных хлебов функции делителя выполняют боковины жатки, удлиненные съемными мысами. Для уборки длинностебельных, полеглых и спутанных хлебов применяют делители торпедного типа, на основании которых закреплены регулируемые внешний и внутренний стеблеотводы.
Механизм подвески и уравновешивания жатки служит для обеспечения копирования рельефа обрабатываемого поля, ограничения перекосов жатки в поперечном и продольном направлении, а также уменьшении динамических нагрузок на узлы и детали сочленений при движении комбайна по неровной поверхности поля. Копирование рельефа достигается установкой копировальных башмаков под корпусом жатки, при этом высота подъема корпуса может регулироваться вручную или (на современных комбайнах) автоматически, по заданным параметрам.

Уравновешивающие устройство подвески обеспечивает постоянство нагрузки на башмаки при помощи пружинно-рычажного механизма в автоматическом (следящем) режиме. При возрастании нагрузки от сил тяжести увеличивается перекос в соединениях, что вызывает изменение рычага силы уравновешивающих пружин, и, благодаря этому, давление на копирующие башмаки остается постоянным. На современных комбайнах система копирования рельефа и уравновешивания жатки чаще выполняется с гидравлическим приводом, управляемым следящими датчиками.
Если копирующие башмаки вязнут в рыхлой и влажной почве, механизм уравновешивания можно отключить, подняв башмаки над почвой при помощи специальных прокладок, устанавливаемых под рычаги наклонной камеры. Такая работа комбайна с широкозахватной жаткой допустима лишь в кратковременном режиме, при уборке урожая на неровных участках. Высоту среза стеблей в этом случае регулируют подъемом жатки с помощью гидроцилиндров.
Для обеспечения эффективной работы жатки с высокой производительностью и без потерь урожая необходимо обеспечить правильную регулировку ее рабочих и дополнительных органов.
Видеоролик: Устройство и принцип работы режущего аппарата типа Шумахер.
Комбайны ведущих производителей
Кормоуборочные комбайны
Кормоуборочные комбайны способны выполнять комплекс операций по уборке урожая кормовых трав, кукурузы, силоса сорго, подсолнечника, зернофуражных и других культур. Комбайн срезает стебли культуры, измельчает их и подает в транспортное средство. Для уборки трав на сено с досушиванием активным вентилированием или для при приготовления из них сенажа комбайн подбирает предварительно подвяленную в валках траву и измельчает ее. В зависимости от технологии заготовки корма комбайн может комплектоваться жаткой или подборщиком (рис. 1.1).
По способу агрегатирования различают самоходные, полунавесные и прицепные кормоуборочные комбайны.
Основные части кормоуборочных комбайнов: жатки или подборщики; питающие, измельчающие и транспортирующие устройства; система защиты от поломок; устройства для внесения консервантов; двигатели; механизмы трансмиссии и управления; гидро- и электрооборудование; ходовая часть.

Устройство кормоуборочных комбайнов
Жатки комбайнов срезают растения и подают их к питающим устройствам.
Для уборки трав и зернофуражных культур с высотой стеблестоя до 1,5 м применяют платформенные жатки сплошного среза. Рабочие органы таких жаток – делители 1 (рис. 1), мотовило 3, режущий аппарат 2 и шнеки 4. При работе делители отделяют срезаемую массу от растений, расположенных с боков жатки, предотвращая спутывание травы и связанные с этим потери корма.
Планки мотовила подводят стебли к режущему аппарату, удерживают их при срезе и подают к шнеку, который правой и левой спиралями смещает растительную массу к центральной части жатки и направляет ее к питающему устройству комбайна.
В платформенных жатках для уборки кукурузы, подсолнечника, сорго и других культур с высоким (более 1,5 м) стеблестоем между мотовилом и шнеком применяют цепочно-планчатый транспортер.

выполняют пассивными и активными. На жатках для уборки трав и фуражных культур устанавливают пассивные делители, выполненные в виде многогранного клина. Кромки клина отклоняют срезаемую часть растений в сторону жатки.
Активные делители с режущим аппаратом разрезают спутанные растения, а активные шнековые делители разрывают образовавшиеся узлы. Активные делители с двумя ножами применяют на уборке силосных культур в комбайнах КСК-100А, КПИ-Ф-2,4.
подводит растения к режущему аппарату, удерживает их при срезе и подает к шнеку или на транспортер.
Жатки для длинностебельных культур оборудуют жесткопланчатыми мотовилами (рис. 2, а), а для уборки трав – копирующими (рис. 2, б).
Мотовила жаток зерноуборочных комбайнов выполняют, как правило, параллелограммными.
Жесткопланчатое мотовило состоит из вала 4, на котором закреплены крестовины 3, жестко соединенные лучами 2 с планками 1. Для придания жесткости лучи соединены стяжками 5. Такое мотовило удовлетворительно работает при уборке прямостоящих и длинностебельных культур. На полеглом и путаном стеблестое планки не поднимают и не подводят стебли к режущему аппарату, что приводит к неравномерной загрузке рабочих органов и значительным потерям корма.

Наряду с этим между траекторией I-I относительного движения точки конца планки и шнеком 6 жатки образуется некоторая «мертвая» зона (на рисунке 2, а заштрихована), в которой скапливаются растения. Это также приводит к неравномерной нагрузке на рабочие органы.
Копирующее мотовило снабжено лучами 2 с поводками 8. Поводки перекатываются по беговой дорожке abcd, благодаря чему точки планок, закрепленных на лучах, перемещаются по траекториям, расположенным близко к режущему аппарату 7 и шнеку 6, исключая образование «мертвой» зоны, характерной для жесткопланчатого мотовила. Благодаря этому растения равномерно подаются к последующим рабочим органам комбайна.
Эксцентриковое мотовило изображено на рис. 2, в, причем для простоты изучения изображена только правая часть параллелограммного четырехзвенного механизма ABCD. Звено AB механизма вращается относительно шарнира А и включает фланцы 12, диски 13 и лучи 2. На концах лучей установлены трубы 10 (звено ВС), на которых крепят планки 1 с пружинными пальцами.
Звено ВС шарнирами С соединено с крестовинами эксцентрикового диска (звено CD). Звенья АВ и DC параллельны между собой, а звено AD параллельно звену DC. При вращении ведущего звена АВ, когда шарнир D не изменяет своего положения, параллельность указанных звеньев сохраняется, т. е. планки с пальцами не изменяют наклона относительно заданного положения.
Наклон планок можно менять, устанавливая ось шарнира D в различные положения.

Планки мотовила совершают сложное движение: переносное вместе с машиной со скоростью v и относительное с окружной скоростью u. Траектроии крайних точек планки мотовила (рис. 3) зависят от соотношения скоростей u и v, т. е. от показателя кинематического режима работы мотовила λ:
λ = u/v, или λ = 2πnr/v,
где n и r – соответственно частота вращения и радиус мотовила.
По заданной скорости v и указанным значениям λ определяют частоту n вращения вала мотовила. Частоту вращения n изменяют вариатором клиноременной передачи привода вала мотовила.
Режущие аппараты платформенных жаток кормоуборочных комбайнов КСК-100А и КПИ-Ф-2,4А сегментно-пальцевого типа нормального резания. Для уравновешивания машины и облегчения работы режущего аппарата на жатках комбайнов КСК-100А устанавливают два ножа с аппозитивным движением, каждый из которых рассчитан на срез растения с половины ширины захвата. Один нож приводится механизмом, расположенным с правой стороны, а другой – с левой стороны.
Ножи приводятся механизмом качающейся шайбы (КСК-100А) или кривошипно-ползунным механизмом (КПИ-Ф-2,4А).
предназначены для скашивания кукурузы, подсолнечника и других культур. Боковые шнеки 4 (рис. 5) роторной жатки и средний пассивный делитель 1 разделяют и поднимают растения, дисковые режущие аппараты срезают растения, а барабаны 6 подают их к питающим устройствам.
Срезанные стебли наклоняются брусом 5 и направляются в измельчающее устройство комлем по ходу вперед.

навешивают вместо жаток при уборке трав, подвяленных в валках. На комбайны КСК-100А, К-Г-6, КПИ-Ф-2,4А и другие навешивают барабанные подборщики с пружинными пальцами. Кормоуборочный комбайн «Дон-680» имеет платформу-подборщик полотенно-пальцевого типа.
Жатки и платформы-подборщики комбайнов выполняют копирующими рельеф поля. Высоту среза регулируют, изменяя положение копирующих башмаков. Жатки опускают и поднимают с помощью гидромеханизмов.
Питающие устройства кормоуборочных комбайнов
Питающие устройства уплотняют и перемещают растительную массу равномерным слоем к измельчающим аппаратам.
Широко применяют четырех- и пятивальцовые питающие устройства (рис. 2). Оси верхних вальцов выполняют подпружиненными, что обеспечивает требуемую подпрессовку массы и устойчивую работу вальцов при неравномерной подаче слоя растительной массы. Для лучшего захвата растений к поверхности вальцов приваривают пластины с выступами.
Нижний валец у противорежущей пластины выполняется гладким.
Металлоуловители комбайнов
Система защиты кормоуборочных комбайнов от поломок при попадании посторонних предметов включает в себя датчик металлодетектора, электронный блок, исполнительный механизм и электромеханизм быстрого останова. Датчик металлодетектора размещают во внутренней полости переднего нижнего вальца, который изготавливают из немагнитной нержавеющей стали.
Когда посторонний металлический предмет проходит вблизи датчика, формируется сигнал обнаружения, который поступает в блок управления электромагнитом быстрого останова привода вальцов и электромеханизма отключения ременной передачи к редуктору.
Рабочий ход блокируется, устанавливается режим «Сброс», и редуктор начинает работать в режиме «Реверс».
Питающее устройство получает обратный ход, освобождаясь от посторонних металлических предметов. Когда на пульте загорается зеленая лампочка, возможна нормальная работа.
Измельчающие аппараты кормоуборочных комбайнов
Измельчающие аппараты должны обеспечить длину резки растений (от 4 до 20 см), доизмельчать зерно кукурузы и зернофуражных культур при уборке на корм в различных стадиях спелости, подавать измельченную массу в транспортные средства, а также быть надежными в работе и простыми при обслуживании и ремонте.
В кормоуборочных комбайнах распространены барабанные и дисковые измельчающие устройства (рис. 4).
Для доизмельчения кукурузы в фазе молочно-восковой и более полной спелости с дроблением початков применяют рифленые 3 перфорированные подбарабаноя (рекаттеры). Их выполняют в виде съемного подбарабанья с рифлями различного профиля. Наряду с рекаттерами используют одно- или двухвальцовые доизмельчители, которые устанавливают в зоне работы измельчающих барабанов.
Барабанные измельчители, защищенные от попадания посторонних предметов, работают надежно, особенно при уборке на силос влажных растений. Но они недостаточно эффективно перемещают измельченные подвяленные травы и зернофуражные культуры, измельчают маслу на различную длину, не обеспечивают заданной степени дробления зерна. Во многом этих недостатков лишены дисковые измельчители.
Дисковые измельчители равномернее, чем барабанные, измельчают корм, особенно при уборке подвяленных трав и зернофуражных культур. Они интенсивнее барабанных перемещают измельченную массу, надежны и просты в устройстве и обслуживании, однако требуют больших затрат энергии, поскольку питающая горловина у них сужена и ножами измельчается толстый слой.
Длина lр резки растений – один из важнейших показателей, определяющих качество кормов. С уменьшением длины резки улучшается сохранность и питательность корма, повышается его усвояемость животными, полнее и плотнее заполняются емкости транспортных средств и кормохранилищ. Однако с уменьшением длины резки возрастают энергозатраты на измельчение корма.
Длину резки растений регулируют, устанавливая различное количество ножей на барабанах или дисках, а также изменяя частоту вращения привода измельчающего аппарата. В большинстве применяемых комбайнов число ножей на барабане или диске: 12, 8, 6, 4 и 3.
Для заточки ножей комбайны оснащают механизмом заточного приспособления с гидромотором. Возвратно-поступательным движением заточного приспособления в комбайнах управляет электронное реле времени, установленное на пульте.
Характеристики кормоуборочных комбайнов
Полунавесной комбайн КПК-3000 агрегатируют с универсальным энергетическим средством УЭС-250 (мощность двигателя Nд = 185 кВт). Комбайн используют с жаткой для уборки трав и зерновых культур в стадии восковой и полной спелости (ширина захвата 3 м), для уборки грубостебельных культур (ширина захвата 3 м), а также подборщиками (ширина захвата 2,2 м).
Комбайн «Дон-680» имеет ряд сборочных единиц (мосты ведущих и управляемых колес, гидро- и электрооборудование, кабина, приборы и др.), унифицированных с зерноуборочными комбайнами семейства «Дон».
Для уборки трав на комбайн устанавливают жатку шириной захвата 4,2 м, а для уборки высокостебельных культур – жатку сплошного среза с шириной захвата 3,4 м и шестирядную ручьевую.
Подборщик на комбайне «Дон-680» полотенно-пальцевый, обеспечивающий подбор трав и соломы массой до 15 кг на 1 м длины валка шириной до 2,2 м.
На комбайне устанавливается двигатель СМД-31Б мощностью Nд = 206 кВт.

Комбайн Е-282 (Германия) характеризуется бесступенчатым изменением скорости движения посредством клиноременного вариатора. В измельчающем барабане комбайна установлены тонкие ножи (толщиной 4 мм), что увеличивает наработку на отказ. На комбайн навешивают подборщики шириной захвата 2,4 или 4,2 м, либо жатки шириной захвата 4,2, 5,1 и 5,6 м.
Для среза кукурузы применяют жатки четырех- и шестирядные, а для сплошного среза – жатку шириной захвата 3,6 м.
Комбайн прицепной кормоуборочный КПИ-2,4А агрегатируют с тракторами тягового класса 1,4 (МТЗ-80, -82). Ширина захвата жатки для уборки кукурузы – 1,8 м, травы – 2,4 м, подборщика – 2 м. На измельчающем барабане установлены тонкие ножи.
Номинальную пропускную способность q0н кормоуборочных комбайнов оценивают по массе кукурузы, скашиваемых подвяленных трав и зернофуражных культур, убираемых за одну секунду рабочего времени. Пропускная способность перечисленных выше кормоуборочных комбайнов приведена в таблице 1.
Таблица 1. Номинальная пропускная способность кормоуборочных комбайнов, кг/с
В реальных условиях эксплуатации пропускную способность q0 комбайна можно рассчитать по формуле:
q0 = σq0н,
Производительность Qсм кормоуборочного комбайна (в тоннах) с учетом коэффициента использования рабочего времени смены τсм будет равна:
Qсм = τсмσq0н/1000.
Кормоуборочные комбайны загружают измельченную массу в грузовую емкость рядом идущего транспортного средства (автомобиля или трактора с прицепом).
Скорость движения v кормоуборочного агрегата устанавливают по пропускной способности q0, урожайности U растительной массы и ширины захвата жатки В, исходя из выражения:
v = σq0н/ВU.
Продолжительность заполнения емкости транспортного средства рассчитывают по формуле:
t = Vтсρε/σq0н,

Жатвенная часть комбайна предназначена для скашивания, соора хлебной массы и транспортировки ее к молотильному аппарату. Комбайн может комплектоваться жатками различной ширины захвата. Жатвенная часть комбайна обычно состоит из двух частей: собственно жатки (мотовило, шнек и т.д) и наклонной камеры. Жатка имеет боковые делители, которыми убираемая масса отделяется от стеблестоя. Эксцентриковое мотовило с постоянным (регулируемым) углом наклона граблин захватывает стебли, подводит к режущему аппарату, поддерживает их во время среза и подает к шнеку. Режущий аппарат сегментно-пальцевого типа подобен косилочному. При поперечном движении ножа с сегментами стебли срезаются и попадают на платформу жатки. Для бесперебойной подачи срезаемых стеблей скорость движения планок мотовила должна в 1,2-1,8 раза превышать скорость движения комбайна. По высоте мотовило устанавливают так, чтобы его планки воздействовали на стебли выше центра тяжести срезанных растений, но ниже колосьев. Для изменения частоты вращения мотовила служат гидромотор, электродвигатель или вариатор, а положение мотовила по высоте изменяется гидроцилиндрами.
Схема общего утройства жатки
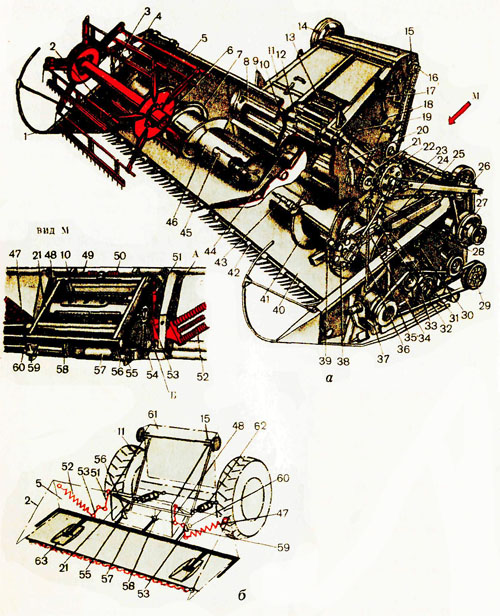
Рис. 1. Жатка комбайна «Дон-1500»:
а — общий вид; б — механизм уравновешивания; 1 — делитель; 2 — боковина; 3, 34, 35 и 62 — гидроцилиндры; 4 и 24 — поддержки мотовила, 5 — ветровой щит; 6 — мотовило; 7 и 41 — витки шнека; 8 — козырек; 9 — упор; 10 — битер проставки; 11 — наклонная камера; 12 — ведомый вал транспортера; 13 — плавающий транспортер: 14 и 29 — шкивы; 15 — подшипник; 16 — ведущий вал транспортера; 17, 20, 32 и 53 — рычаги; 18, 23, 30 и 31 — регулировочные винты; 19 — крюк; 21 — проставка; 22. 26, 38 — звездочки; 25 — цепь; 27 — вариатор; 28 — штанга; 33 — привод шнека; низм битера; 45 — палец; 46 — труба шнека; 47 и 52 пружинные блоки; 48 и 51 — подвески; 49 и 50 — растяжки; 54 — штырь; 55 и 59 — упоры; 56 и 60 — ролики; 57 — корпус жатки; 58 — центральный шарнир; 61 — молотилка, 63 — башмак.
Типы режущих аппаратов и их приводы
Режущий аппарат служит для срезания растений при прямом комбайнировании. Он состоит из пальцев и ножа с сегментами. Пальцы снабжены противорежущими пластинами. Нож приводится в возвратно-поступательное движение механизмом привода. На жатках комбайнов все большее распространение получает режущий аппарат системы Шумахера.
Возвратно-поступательный механизм привода
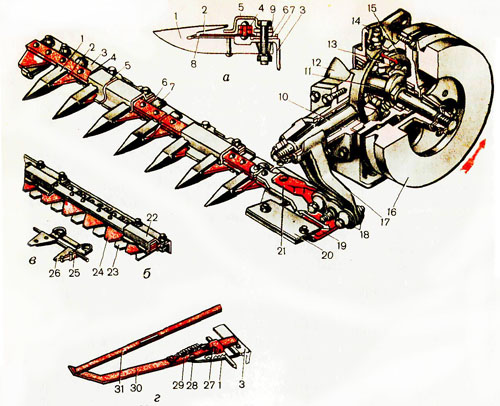
Режущий аппарат. На жатках комбайнов и валковых жатках устанавливают следующие режущие аппараты: сегментно-пальцевой закрытого типа (рис. 2, а), беспальцевой (рис. 2, б) или сегментно-пальцевой открытого типа (рис. 2, в).
Сегментно-пальцевой режущий аппарат закрытого типа состоит из пальцев 1, закрепленных на брусе 3, и ножа, снабженного сегментами 2. На пальцах 1 установлены противорежущие пластины 8. К левому концу спинки 4 ножа прикреплены основание 19 и головка 21 с шаром для присоединения механизма привода.
Беспальцевой режущий аппарат состоит из неподвижного ножа, образованного сегментами 23, и подвижного ножа с сегментами 24.
Сегментно-пальцевой режущий аппарат открытого типа снабжен подвижным ножом с сегментами и короткими пальцами 25 с вкладышами 26.
Ножи режущих аппаратов всех типов совершают возвратно-поступательное движение. При движении комбайна в промежутки между неподвижными элементами режущего аппарата (пальцами 1, 25 или сегментами 23) заходят стебли растений, подвижные элементы (сегменты 2, 24) прижимают их к острой кромке неподвижных режущих элементов и срезают.
Рис. 2. Режущий аппарат комбайна «Дон-1500Б»:
а — сегментно-пальцевой закрытого типа; б— беспальцевой;
в— сегментно-пальцевой открытого типа; г — стеблеподъемник;
1, 25— пальцы; 2, 23, 24— сегменты; 3— брус; 4— спинка ножа;
5, 22— прижимы; 6— прокладки; 7, 9— пластины трения;
8, 26— про-тиворежущие пластины (вкладыши пальцев);
10 — колебательный вал; 11— ведущий вал; 12 — корпус;
13 — палец; 14— сапун; 15— водило; 16— шкив-маховик;
77—рычаг; 18— соединительное звено; 19 — основание головки ножа;
20— направляющая; 21 — головка ножа; 27—хомут; 28— упор;
29— пружина; 30— пластина; 31 — перо
У режущих аппаратов с кривошипно-шатунным приводом ножа осевые линии сегментов и пальцев при крайних положениях должны совпадать. В случае отклонения более чем на 5 мм аппарат центрируют, изменяя длину шатуна.
Для подъема полеглых стеблей на пальцы режущего аппарата закрытого типа устанавливают стеблеподъемники (рис. 2, г). Их закрепляют хомутами 27 на каждом втором пальце при уборке изреженных и на каждом третьем-четвертом при уборке густых и длинносоломистых полеглых хлебов.
Режущий аппарат системы Шуммахера
Основной конструктивной особенностью данного аппарата является расположение сегментов ножа с ориентацией скоса режущей кромки поочередно вверх и вниз. Противорежущие кромки на спаренных пальцах находятся вверху и внизу. Поочередное направление скоса режущей кромки сегментов способствует лучшему удержанию убираемых стеблей в процессе резания и препятствует затягиванию массы в зазор режущих пар. При этом значительно уменьшаются силы резания. Чередующееся расположение режущих кромок сегментов упрощает требуемые регулировки режущего аппарата.
Сегменты PRO-CUT изготавливаются и упрочняются специальными методами и крепятся болтами с зубчатой конической накаткой. Стержень такого болта врезается в сегмент и спинку ножа, обеспечивая прочность соединения. Надежность крепления дополняют самозажимные гайки.
Косилочные ножи изготавливаются секционными и в местах стыка соединяются сегментами и специальными соединительными пластинами. Это уменьшает габариты упаковки до 2,4 м и упрощает транспортировку ножа.
Сдвоенный палец состоит из трех штампованных частей и имеет твердые и износостойкие рабочие поверхности. Глубина упрочненной части противореза увеличена примерно на 30% из-за остроугольной формы кромки. Благодаря этому длительное время обеспечивается стабильность резания. В сочетании с универсальными стеблеподъемниками с простым механизмом крепления поддерживается стабильность работы режущего аппарата при уборке различных культур на разных уборочных машинах.
Вместо режущего аппарата и мотовила на жатке может устанавливаться подборщик для подбора хлебной массы из валка при раздельном способе уборки. Подборщики бывают полотенно-транспортерные и барабанные. Привод механизмы подборщика получают через специально монтируемую передачу. По высоте подборщик устанавливают так, чтобы концы пружинных пальцев полностью захватывали лежащие на земле стебли убираемых растений.
Молотило и его устройство
Мотовило подводит стебли к ножу, поддерживает их во время среза, подает их к шнеку и очищает от них режущий аппарат. Применяют планчатое и универсальное мотовила.
Планчатое мотовило (рис. 3, а) образовано пятью планками 3, которые прикреплены при помощи лучей 5 к фланцам 13. При вращении мотовила планки его поочередно погружаются в хлебную массу, отделяют порции стеблей, подводят их к режущему аппарату и укладывают срезанные стебли на платформу жатки. Планчатое мотовило обычно устанавливают на валковых жатках и применяют при скашивании прямостоячих хлебов.
Универсальное эксцентриковое мотовило (рис.3, б) снабжено граблинами 1 с пружинными пальцами 24. Цапфы 21 трубчатого вала 14 мотовила вращаются в подшипниках б и 22, установленных на поддержках 4 и 24 (см. рис. 4, а), опирающихся на гидроцилиндры 3 и 35.
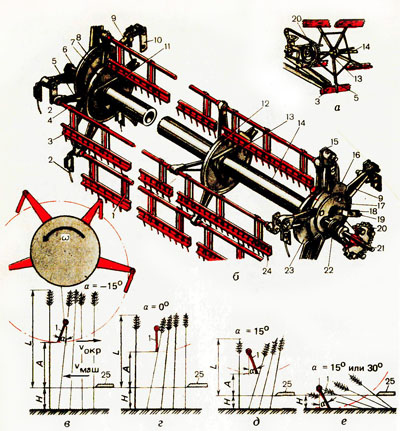
К фланцам 11 и 13 (см. рис. 3, б), приваренным к трубчатому валу 14, прикреплены диски 7, 12, 23 с лучами 5. На концах лучей шарнирно смонтированы трубы 4, снабженные подвесками для установки граблин 1. К обоим концам труб 4 приварены поводки 10, 15, на пальцах которых смонтированы лучи 9, прикрепленные к обоймам 8 и 16. На цапфу 21 вала свободно надета втулка эксцентрика 17, на внутренней стороне которого установлены три ролика. От проворачивания эксцентрик удерживается поводком 18, ролик 19 которого входит в фигурный паз копира. По роликам эксцентрика перекатывается обойма, обеспечивающая заданный угол а наклона граблин (рис.3, в). При вращении мотовила пальцы совершают плоскопараллельное движение, одинаково хорошо захватывая прямостоячие и полеглые стебли. Поэтому универсальное мотовило наиболее распространено.
Угол а наклона граблин изменяется автоматически от —15° (наклон вперед) до +30° (наклон назад) при перемещении мотовила в вертикальном или горизонтальном направлении. Пружинные пальцы 2 (см. рис. 3, б), прикрепленные к концам лучей 9, предохраняют концы граблин и вал от наматывания стеблей. На левой цапфе мотовила смонтирована предохранительная муфта с ведомой звездочкой 20. Муфта рассчитана на передачу вращающего момента 600 Н • м.
Рис.3. Мотовило:
а — планетарное; б — эксцентриковое; в — схема работы;
г, д и е — положение граблины при уборке соответственно
нормальных прямостоячих или частично пониклых хлебов,
низкорослых и полеглых хлебов; 1 — граблина; 2 к 24 — пальцы;
3 — планка; 4 — труба граблины; 5 и 9 — лучи; 6 и 22
подшипники; 7, 12 к 23 — диски в и 16 — обоймы
эксцентрика; 10, 15 и 18 — поводки; 11 и 13 — фланцы;
14 — трубчатый вал; 17 — эксцентрик; 19 — ролик; 20 — звездочка;
21 цапфа; 25 — режущий аппарат.



